火星救援
计算、显示并测量《火星救援》一书中马克·沃特尼(Mark Watney)从区域 3 栖息舱(HAB)到区域 4 火星探测车(MAV)之间行走路径估计值.
该范例中的所有位置都参照火星上的位置. 这可以用 GeoPosition 具体指定或之后从 GeoModel 选项中选取.
以下为区域 3 和 4 的着陆点位置估计.
In[1]:=
ares3 = GeoPosition[{31.2, -28.5}, "Mars"];
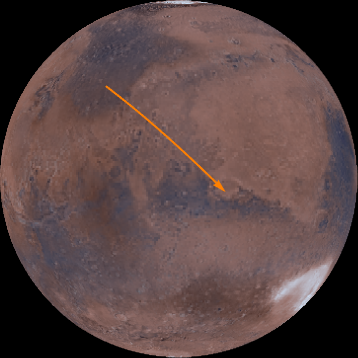
ares4 = GeoPosition[{-4.32, 15.28}, "Mars"];由此得出了,马克的火星旅行的第一个近似.
In[2]:=
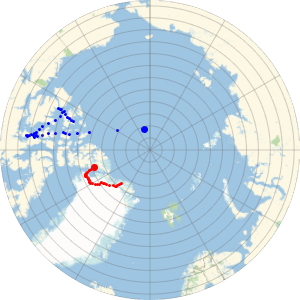
GeoGraphics[{Orange, Thick, Arrow@GeoPath[{ares3, ares4}]},
GeoRange -> All, GeoProjection -> "Orthographic",
Background -> Black]Out[2]=
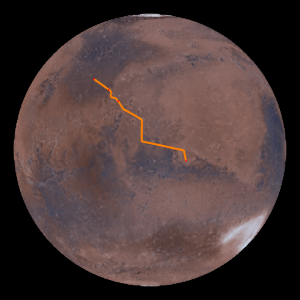
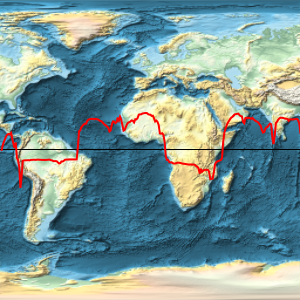
从区域 3 栖息舱,马克跟随水流冲出的山谷移动到了火星谷地.
In[3]:=

mawrthVallis = GeoPosition[CompressedData["
1:eJxTTMoPSmViYGCQAGIQLd/6OnCHnJXDN42Y/kOlxgdsua4vLvhr6QAkbbnE
jQ8wgMABS4d17g+rRNYZHZg1EwgiLaHqjQ5wgRVaOhz+ChRwMoKqt3BYAhS9
rmx0AKTLPdHCoRBksIHRgf5DQIX8Fg4iIANDjA5oAo35usLcAaLO6EDQDjmg
ixD8s2eAgMccrj4NBJ6Zwc0DK99h5vAmEMQyPACmV5s5gN3RYAixf6GZA8Re
wwNgdzbB5A0OGINAsZkDxB8GEPf5m0H8H64P9Z8ZxH+H9CDqN5tC/at3AOIu
U0h4fNWF2Kdo6uABYhzXhaj/bAL1jy5E/RUTB3A4ztQ5AAD2PaQO
"]];In[4]:=
GeoGraphics[{Thick, Orange, Arrow@GeoPath[mawrthVallis]},
GeoModel -> "Mars", GeoRangePadding -> Quantity[100, "Miles"]]Out[4]=

然后马克从 Trouvelot 和 Rutherford 陨石坑之间走过.
In[5]:=

GeoPosition /@ {Entity["SolarSystemFeature", "TrouvelotMars"],
Entity["SolarSystemFeature", "RutherfordMars"]}Out[5]=
In[6]:=
rtCraters = GeoPosition[{17.52, -11.91}, "Mars"];随后向 Marth 陨石坑放方向前进.
In[7]:=
marthCrater = GeoPosition[Entity["SolarSystemFeature", "MarthMars"]]Out[7]=
从那里他向南继续前进了 540 公里.
In[8]:=
pos540S =
GeoDestination[marthCrater,
GeoDisplacement[{Quantity[540, "Kilometers"], "South"}]]Out[8]=
最后,他来到了 Schiaparelli 陨石坑附近.
In[9]:=
schiaparelliCrater = GeoPosition[{-0.16, 14.38}, "Mars"]Out[9]=
In[10]:=

geopath =
GeoPath[{{ares3, mawrthVallis[[1, 1]]},
mawrthVallis, {mawrthVallis[[1, -1]], rtCraters, marthCrater,
pos540S, schiaparelliCrater, ares4}}];该地理路径沿火星表面的长度.
In[11]:=
GeoLength[geopath, GeoModel -> "Mars"]Out[11]=
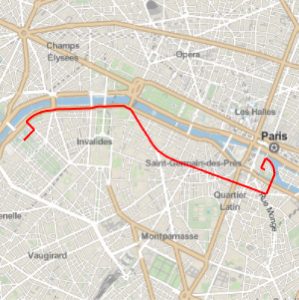
最后,添加书中提到的几个地名和标签.
In[12]:=
labeled[pos_, label_, offset_: {Left, Bottom}] := {Point[pos],
Text[Style[label, Directive[12, Italic, White]], pos, offset]}In[13]:=
points = labeled @@@
Join[EntityValue[{Entity["SolarSystemFeature", "ArabiaTerraMars"],
Entity["DeepSpaceProbe", "MarsPathfinder"],
Entity["DeepSpaceProbe", "MERDashBOpportunityRover"],
Entity["SolarSystemFeature", "TerraMeridianiMars"],
Entity["SolarSystemFeature", "RutherfordMars"],
Entity["SolarSystemFeature", "BecquerelMars"],
Entity["SolarSystemFeature", "TrouvelotMars"],
Entity["SolarSystemFeature", "MarthMars"]}, {"Position",
"Name"}], {
{ares3, "Ares 3 HAB"}, {ares4, "Ares 4 MAV", {Right, Bottom}}}];这里便得出了该路程的最终地图.
In[14]:=
GeoGraphics[{Orange, Thick, geopath, PointSize[Large], points},
GeoModel -> "Mars"]Out[14]=