Simulación HIL de un modelo de suspensión Quarter-Car
La simulación de Hardware-in-the-Loop (HIL) es una herramienta de desarrollo útil para probar si el sistema físico real es arriesgado, costoso o no es una opción. En la simulación HIL, un modelo del sistema físico se simula en tiempo real.
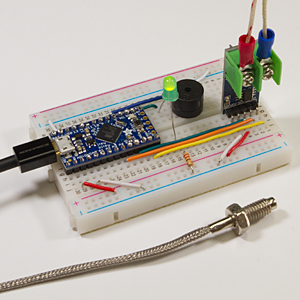
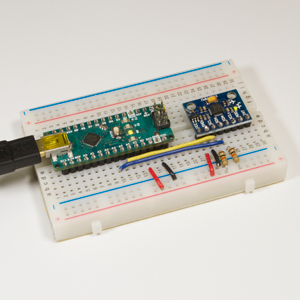
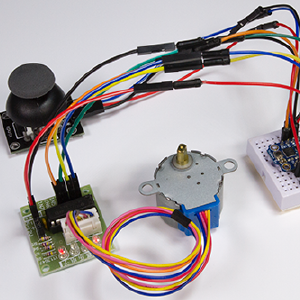
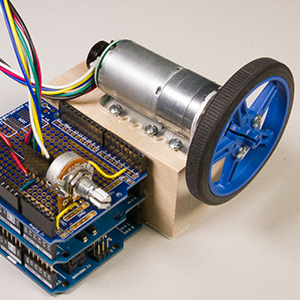
En este ejemplo, el modelo de sistema de suspensión de quarter-car es discretizado e implementado a un Adafruit Metro Mini. Se utilizará una palanca de mando conectada al pin A3 de la placa para especificar la entrada de camino de referencia a la simulación HIL que se ejecuta en la placa. Finalmente, la respuesta en tiempo real del sistema se visualizará utilizando los datos obtenidos a través del marco del dispositivo.
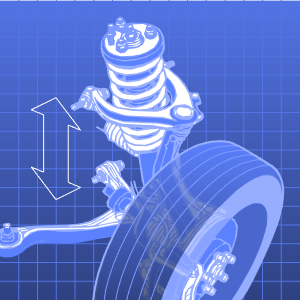
El diagrama de cuerpo libre del sistema.
Los parámetros.
El modelo con el  como entrada y
como entrada y  ,
,  y
y  como salidas.
como salidas.
Discretice el modelo.
La palanca de mando lee un valor de 0 V a 4.85V, con la lectura por defecto de 2.44V. Cambie la escala de los valores para obtener la entrada de referencia de  unidad a 1 unidad.
unidad a 1 unidad.
El modelo de la palanca de mando.
El sistema completo con la palanca de mando como entrada y  ,
,  y
y  como salidas.
como salidas.
La especificación del microcontrolador con la entrada proveniente del pin analógico A3 y las salidas transmitidas en serie.
Implemente el modelo.
Abra una conexión en serie a la simulación HIL.
Envíe una tarea para leer y analizar los datos.
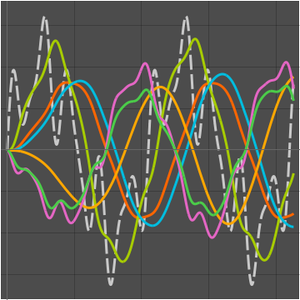
Los resultados de la simulación HIL.
Elimine la tarea y cierre el dispositivo.