쿼터 카 서스펜션 모델의 HIL 시뮬레이션
HIL (Hardware-in-the-Loop) 시뮬레이션은 실제 물리적 시스템의 테스트가 위험하거나 고가이거나 혹은 선택의 여지가 없는 경우에 유용한 개발 도구입니다. HIL 시뮬레이션에서는 물리적 시스템 모델의 시뮬레이션이 실시간으로 이루어집니다.
전체 Wolfram 언어 입력 표시하기
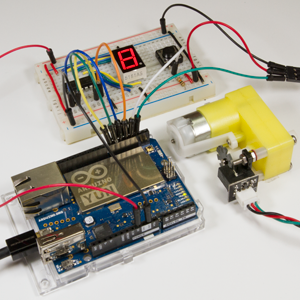
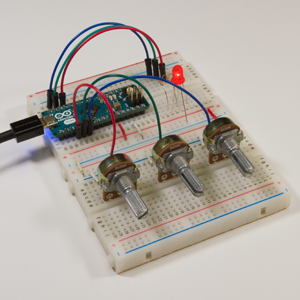
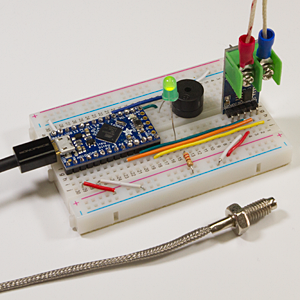
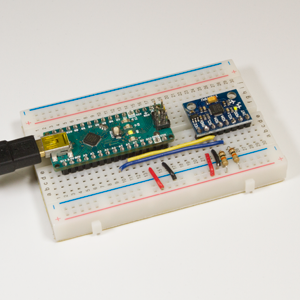
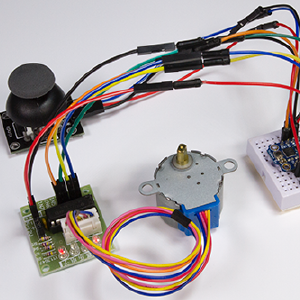
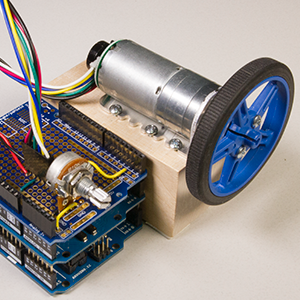
이 예는 쿼터 카 서스펜션 시스템 모델을 이산화하여 Adafruit Metro Mini에 배치합니다. 보드의 핀 A3에 연결된 조이스틱을 사용하여 보드에서 실행되고 있는 HIL 시뮬레이션의 기준 도로 입력이 지정됩니다. 마지막으로 장치의 프레임워크에서 얻은 데이터를 사용하여 시스템의 실시간 응답이 시각화됩니다.
시스템의 자유도를 살펴봅니다.
매개 변수.
입력  및 출력
및 출력  ,
,  ,
,  를 가진 모델입니다.
를 가진 모델입니다.
모델을 이산화합니다.
조이스틱은 0V에서 4.85V까지(기본값은 2.44V)의 값을 읽습니다. 값을 다시 스케일하여  단위부터 1단위까지의 기준 입력을 얻습니다.
단위부터 1단위까지의 기준 입력을 얻습니다.
조이스틱 모델.
입력으로서의 조이스틱과 출력  ,
,  ,
,  를 가진 완전 시스템입니다.
를 가진 완전 시스템입니다.
입력이 아날로그 핀 A3에서 와서 출력이 직렬로 전송되는 마이크로 컨트롤러 지정입니다.
모델을 배치합니다.
HIL 시뮬레이션과의 직렬 연결을 엽니다.
데이터를 읽고 분석하는 작업을 보낼 수 있습니다.
전체 Wolfram 언어 입력 표시하기
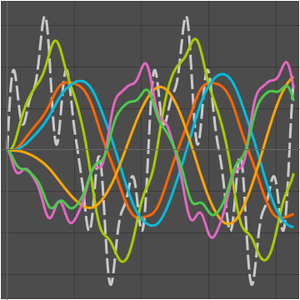
HIL 시뮬레이션 결과입니다.
작업을 삭제하고 장치를 닫습니다.