四分之一汽车悬架模型的 HIL 仿真
硬件在环 (HIL) 仿真是一种有用的开发工具,在测试实际物理系统时存在风险,且昂贵或不是一个选择。在 HIL 仿真中,是实时模拟物理系统的模型。
显示完整的 Wolfram 语言输入
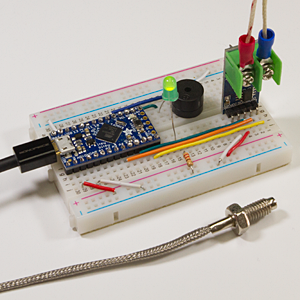
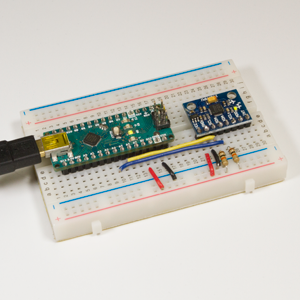
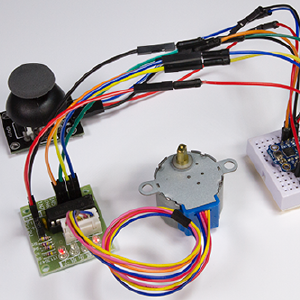
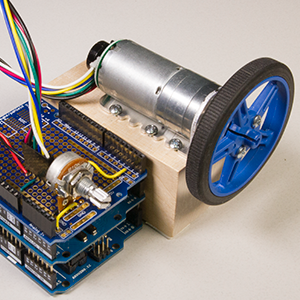
在这个例子中,四分之一汽车悬架系统的模型被离散化并部署到 Adafruit Metro Mini。连接到电路板引脚 A3 的操纵杆将用于指定电路板上运行的 HIL 仿真的参考道路输入。最后,使用通过设备框架获得的数据可视化系统的实时响应。
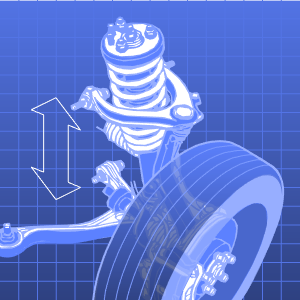
系统的自由体图。
参数。
 为输入,
为输入, 、
、 和
和  为输出的模型。
为输出的模型。
离散化模型。
操纵杆读取 0V 至 4.85V 的值,默认读数为 2.44V。重新调整值以获取  单位到 1 单位的参考输入。
单位到 1 单位的参考输入。
操纵杆的模型。
完整系统,操纵杆作为输入和  、
、 和
和  作为输出。
作为输出。
微控制器规范,输入来自模拟引脚 A3,输出通过串行传输。
部署模型。
打开与 HIL 仿真的串行连接。
提交任务以读取和解析数据。
显示完整的 Wolfram 语言输入
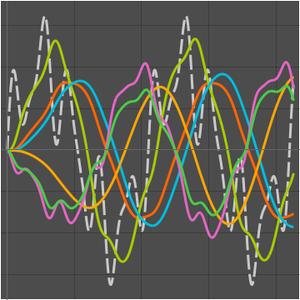
HIL 仿真的结果。
删除任务并关闭设备。