Simulation HIL d'un modèle de suspension d'un quart de véhicule
La simulation HIL (Hardware-in-the-Loop) est un outil de développement utile dans les cas où le test du système physique est risqué, coûteux ou non optionnel. Dans la simulation HIL, un modèle du système physique est simulé en temps réel.
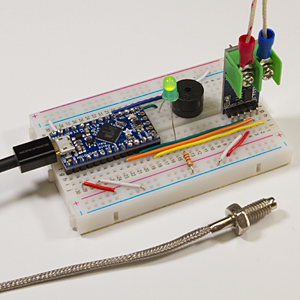
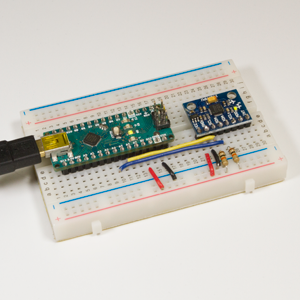
Dans cet exemple, le modèle d'un système de suspension d'un quart de véhicule est discrétisé et déployé sur un Adafruit Metro Mini. Un joystick connecté à la broche A3 de la carte sera utilisé pour déterminer la route de référence pour la simulation HIL. Enfin, la réponse en temps réel du système sera visualisée en utilisant les données obtenues à travers le cadre du dispositif.
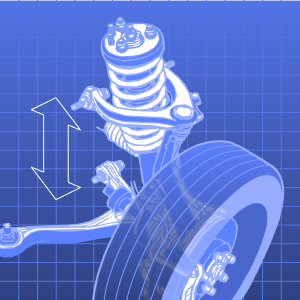
Le schéma du corps libre du système.
Les paramètres.
Le modèle avec en entrée  et en sortie
et en sortie  ,
,  et
et  .
.
Discrétisez le modèle.
Le joystick lit une valeur allant de 0 V à 4,85 V avec une valeur par défaut de 2,44 V. Rééchelonnez les valeurs pour obtenir l'entrée de référence de l'unité  à l'unité 1.
à l'unité 1.
Le modèle du joystick.
Le système complet avec en entrée le joystick et en sortie  ,
,  et
et  .
.
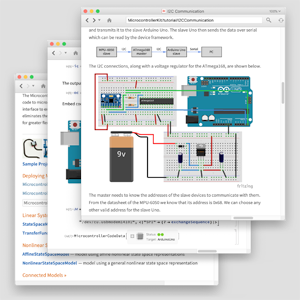
Les caractéristiques du microcontrôleur avec l'entrée provenant de la broche analogique A3 et les sorties transmises en série.
Déployez le modèle.
Établissez une connexion en série avec la simulation HIL.
Créez une tâche pour lire et analyser les données.
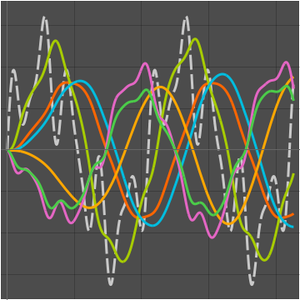
Les résultats de la simulation HIL.
Supprimez la tâche et mettez fin à la connexion avec l'appareil.