Control de posición de bucle abierto de un motor paso a paso
En el control de bucle abierto, el controlador realiza una acción de control sin ningún comentario de la respuesta del sistema a la acción de control. El esfuerzo de control es ajustado por otro sistema o manualmente por un operador humano.
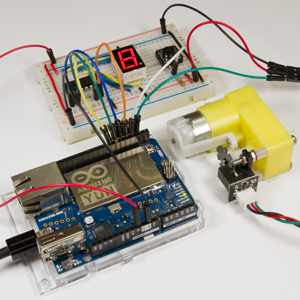
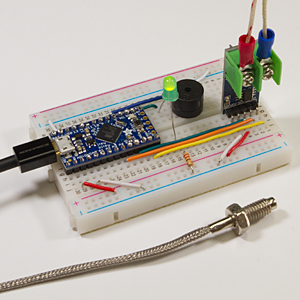
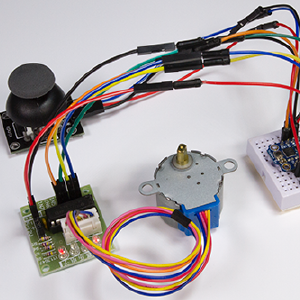
En este ejemplo, se utiliza una palanca de mando para especificar el número de pasos y la dirección de rotación de un motor paso a paso 28BYJ48. Un microcontrolador Adafruit Trinket aplicará la secuencia requerida de pulsos basados en la medida de la palanca de mando. La asignación de pines del microcontrolador y la secuencia de impulsos del motor paso a paso se describen en una biblioteca externa. El código en la biblioteca externa, así como el código generado, se utilizará para lograr el control de bucle abierto del motor paso a paso.
El diagrama de cableado de las conexiones.
La revolución completa de 512 pasos se puede dividir en incrementos más pequeños.
Seleccione 8 pasos por incremento.
Permita que el movimiento hacia adelante de la palanca de mando por encima de 3V resulte en un incremento del motor.
Permita que un valor por debajo de 1V resulte en un incremento en la dirección opuesta.
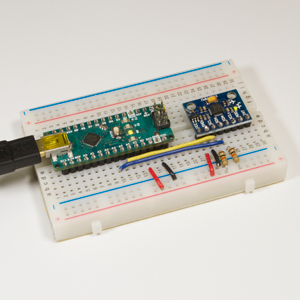
Ensamble el controlador de circuito abierto.
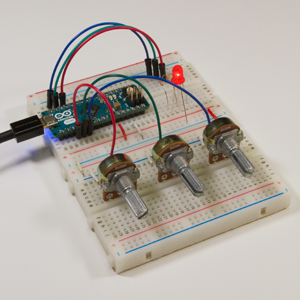
La entrada de palanca de mando.
La salida es manejada por la biblioteca externa y usa los pines 0-3 del abalorio.
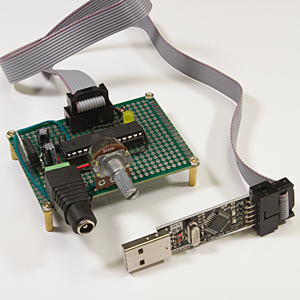
La especificación completa del microcontrolador.
El objeto utiliza el programador USBtiny.
La ubicación de la biblioteca.
Cargue el código. Puede que tenga que desconectar la entrada de la palanca de mando antes de cargar.