ステッピングモーターの開ループ位置制御
開ループ制御では,コントローラがシステムの応答から制御動作へのフィードバックなしで制御動作を行う.制御努力は別のシステムによって,あるいは人間のオペレータによって手動で調整される.
完全なWolfram言語入力を表示する
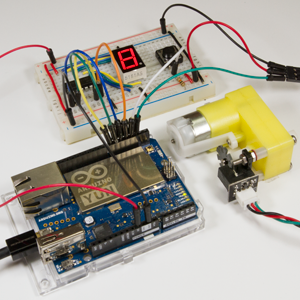
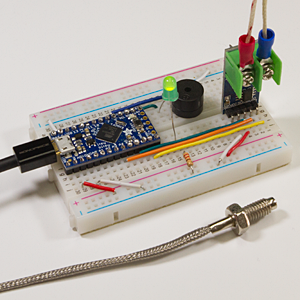
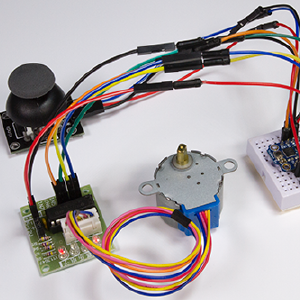
この例では,ジョイスティックを使って28BYJ48ステッピングモーターのステップ数と回転の方向を指定する.Adafruit Trinketマイクロコントローラはジョイスティックの測度値に基づいて必要なパルスシーケンスを適用する.マイクロコントローラのピンマッピングとステッピングモーターのパルスシーケンスは外部ライブラリに説明されている.外部ライブラリのコードと生成されたコードを使ってステッピングモーターの開ループ制御を行う.
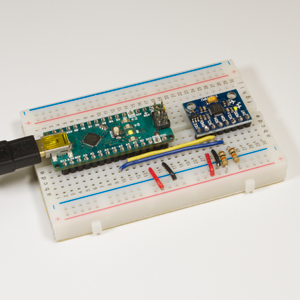
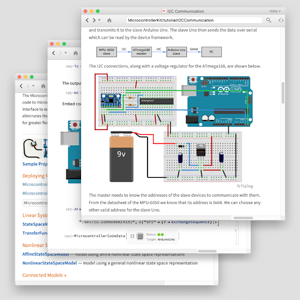
接続の配線図.
512ステップの完全な回転はより小さい増分に分割できる.
増分当り8ステップを選ぶ.
ジョイスティックの前進運動を3Vより大きくすると,モーターが1増分することにする.
1V未満の値で反対方向に1増分するとする.
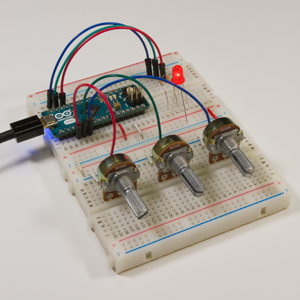
開ループコントローラを組み立てる.
ジョイスティックの入力.
出力は外部ライブラリで操作され,Trinketの0から3までのピンを使う.
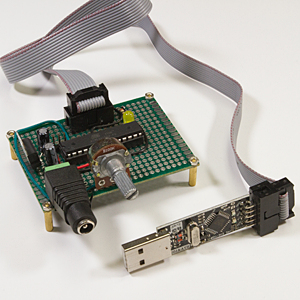
完全なマイクロコントローラ指定.
TrinketはUSBtinyのプログラマを使う.
ライブラリの場所.
コードをアップロードする.アップロードする前にジョイスティック入力の接続を解除しなければならないかもしれない.