步进电机的开环位置控制
在开环控制中,控制器执行控制动作,而没有来自系统对控制动作的响应的任何反馈。控制工作由另一个系统调整或由操作人员手动调整。
显示完整的 Wolfram 语言输入
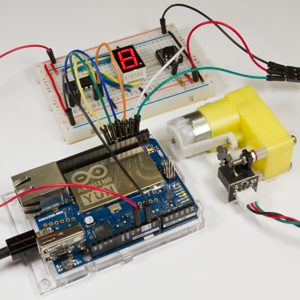
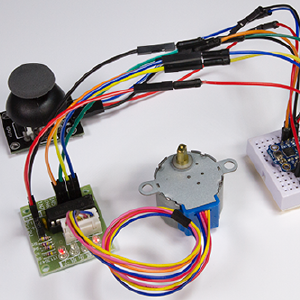
在此范例中,操纵杆用于指定 28BYJ48 步进电机的步数和旋转方向。Adafruit Trinket 微控制器将根据操纵杆测量应用所需的脉冲序列。微控制器的引脚映射和步进电机的脉冲序列在外部库中描述。外部库中的代码以及生成的代码将用于实现步进电机的开环控制。
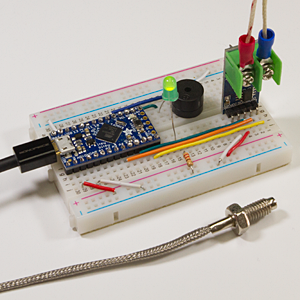
连接的接线图。
512 步的完整旋转可以分成更小的增量。
每增量选择 8 个步骤。
让操纵杆的前进运动高于 3V 会导致一个电机增量。
设低于 1V 的值会导致相反方向的一个增量。
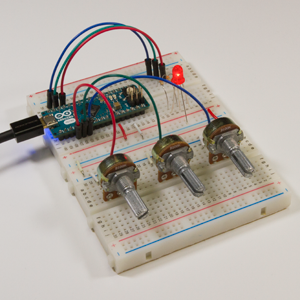
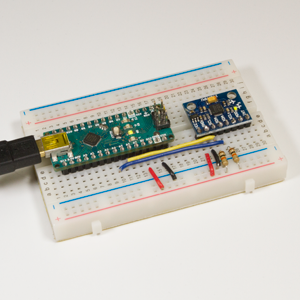
组装开环控制器。
操纵杆输入。
输出由外部库处理,并使用 Trinket 的 0–3 引脚。
完整的微控制器规范。
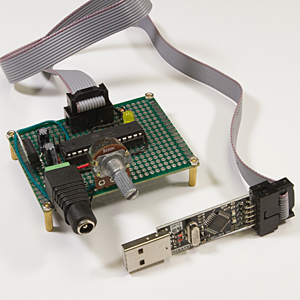
Trinket 使用 USBtiny编程器。
库的位置。
上传代码。在上传之前,您可能必须断开操纵杆输入。