设计控制器
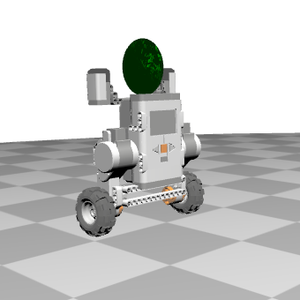
从升空过程中的火箭到摩天大楼和 Segway,都可以找到控制器。通过将 Wolfram 语言的控制系统框架与系统模型相结合,可以轻松设计和测试控制系统。在该范例中,基于模型的线性化表示来设计用于保持Segway 直立的控制器。
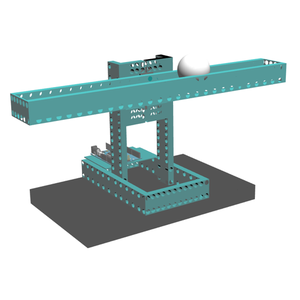
通过使用模型中的初始值将 Segway 模型围绕直立位置线性化,并提取您感兴趣的状态变量。
定义控制设计的重量变量。对 Segway (revolute1.phi) 角度的偏差使用大的惩罚。
计算 LQ 控制器的增益。
将 LQ 控制器的计算值保存到带有一个控制器的模型中。
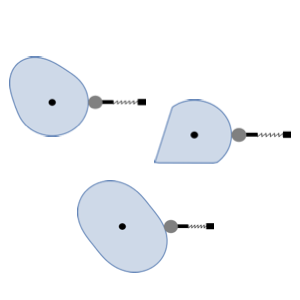
将控制参数保存在模型中,在 SystemModeler 中显示三维动画。