ホイストクラブのモデル反転制御
制御器の設計ではモデルが非常に役立ちます.この例では,ホイストクラブのモデルを使って非線形系の制御におけるモデル反転制御の応用例を示します.
システム
ホイストクラブは,橋の幅全体に渡ってホイストおよびその積荷を運ぶために橋型クレーンで広く使われます.クラブを動かすとき,積荷が振り回されないようにすることが重要です.それによりクレーンや積荷だけではなく周囲の機械や材料にもダメージを与える可能性があるからです.

モデルと制御器
クラブモデルには積荷を吊るすロープと繋がった水平移動するクラブが含まれます.モデル反転制御は,クラブと積荷を指定された水平の場所まで動かすのに必要な力を計算するために使われます.
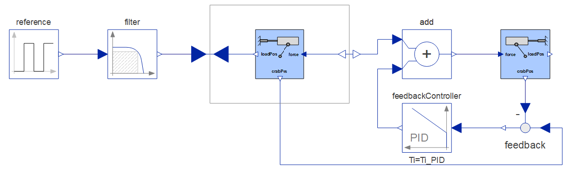
Modelica.Blocks.Math.InverseBlockConstraintsブロックを使い,その入力と出力を繋ぐだけでクラブと積荷のモデルを反転する.制御器自体は,希望の積荷の位置を指定する基準信号,フィルタ,反転モデル,フィードバック制御器(この場合はPID制御器)で構成される.
シミュレーション結果
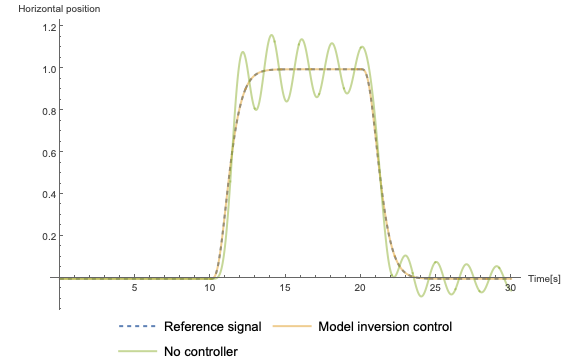
制御器がある場合とない場合の積荷の水平位置.基準位置だけに基づいてクラブと動かすと,積荷は振り回され始める.しかし制御器を使うことで振動はなくなり,基準信号にほぼ従って積荷は迅速かつ正確に動かされる.
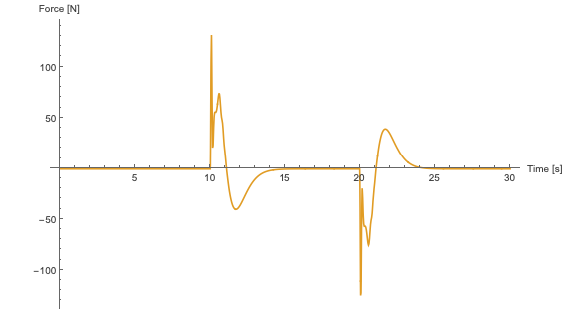
クラブと積荷を希望の位置まで動かす制御器によって使われる制御信号(入力の力).信号は反転モデルとフィードバック制御器の両方に基づいている.
Wolfram System Modeler
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »