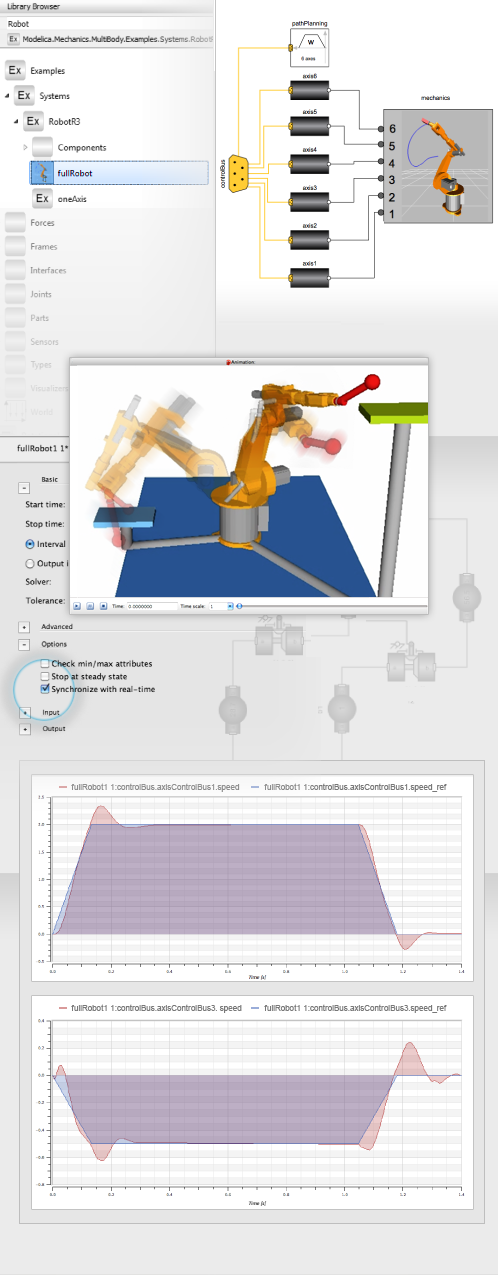
Señales de referencia y medición para dos de los seis ejes del robot
Para ejecutar este ejemplo necesitará
Por favor haga una selección:
Obtener unaUse modelos incorporados
Acceda al los modelos de ejemplo incorporados para estudiarlos y usarlos como bloques de construcción.
Simulación en tiempo real
Ejecute la simulación a la misma velocidad que el robot físico.
Animación 3D automática
Esta animación se crea automáticamente según el diseño del modelo.
Planificación de trayectorias
Compare cómo se corresponden las trayectorias reales con las trayectorias planificadas del robot.
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »