Control de profundidad de un submarino
Navegar rápidamente de una profundidad a otra es un requisito operativo para un submarino. En operaciones de sigilo, es importante que no haya oscilaciones durante este movimiento. El siguiente ejemplo muestra cómo diseñar un controlador para tales aplicaciones.
Para ejecutar este ejemplo necesitará
Las versiones más recientes de System Modeler y Mathematica.
Por favor haga una selección:
Obtener unaprueba gratuita Continuar
con la descarga
Modelo de un submarino
El submarino ajusta su profundidad variando su peso, el cual varía ajustando el volumen de agua almacenado en los tanques de lastre.
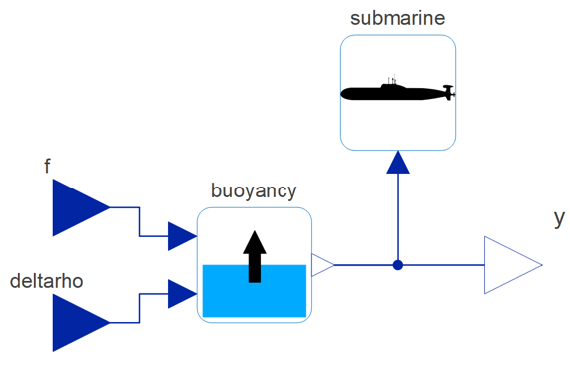
Diagrama del modelo de submarino.
Linealice con facilidad alrededor del punto de equilibrio
El modelo no lineal del submarino se linealiza alrededor de su punto de equilibrio utilizando la funcionalidad de modelado de sistemas.
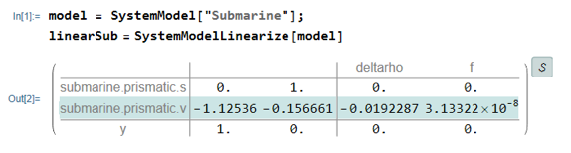
Representación de espacio de estados del modelo linealizado.
Diseñe y conecte un controlador con rapidez
Se diseña un controlador utilizando ganancias por colocación de polos de manera que los polos de bucle cerrado estabilizan el sistema. El controlador se conecta automáticamente al modelo no lineal del submarino.
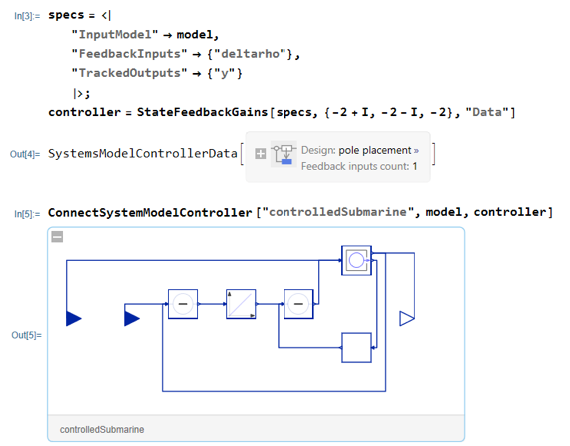
Flujo de trabajo en Wolfram Language para diseñar y conectar el controlador con el modelo no lineal del submarino.
Respuesta del submarino controlado
Los tanques de lastre del submarino absorben agua, lo cual incrementa la densidad promedio del submarino y permite que se hunda. El controlador sigue la señal de referencia, y el submarino alcanza la profundidad especificada sin oscilaciones.
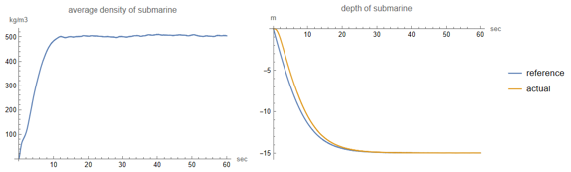
En la representación gráfica de la izquierda, la curva azul representa la densidad promedio del submarino. En la representación de la derecha, la curva azul representa la profundidad de referencia y la curva naranja representa la profundidad real del submarino.
Wolfram System Modeler
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »