潜水艦の深度制御
潜水艦には,ある深さから別の深さまで迅速に到達できることが要求されます.ステルス軍事行動において,この動きで振動が起こらないことが重要です.以下の例では,そのような応用のための制御器を設計する方法を示します.
潜水艦のモデル
潜水艦は,その重さを変化させることによって深度を調整します.重さは,潜水艦のバラストタンク内の水の量を調整することで変化させます.
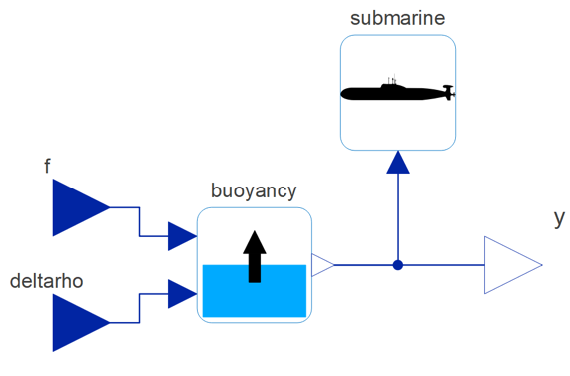
潜水艦モデルのダイアグラム
平衡点付近で簡単に線形化する
非線形の潜水艦モデルは,その平衡点付近でシステムモデリング機能を使って線形化されます.
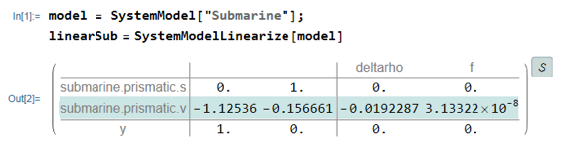
線形化モデルの状態空間表現
制御器を迅速に設計し接続する
制御器は,閉ループ極がシステムを安定させるように極配置ゲインを使用して設計され,非線形潜水艦モデルに自動的に接続されます.
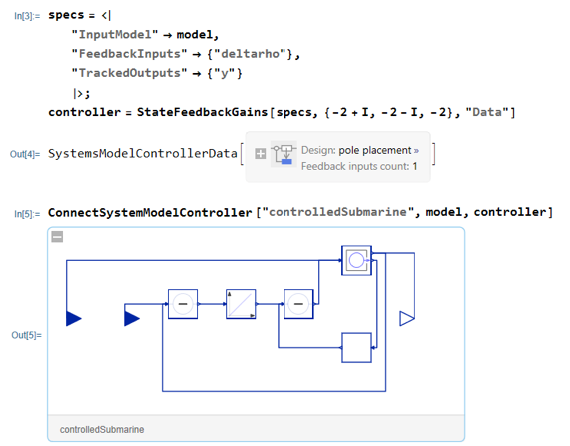
制御器を設計して非線形潜水艦モデルに接続するためのWolfram言語のワークフロー
制御された潜水艦の応答
潜水艦のバラストタンクに水が入り,潜水艦の平均密度が増加すると潜水艦が沈みます.制御器は基準信号を追跡し,潜水艦は振動することなく指定された深度に到達します.
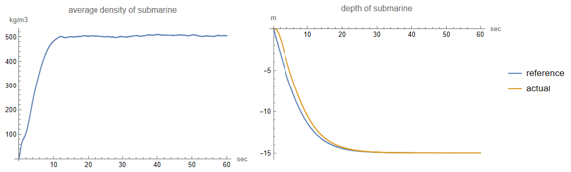
左のプロットでは,青い曲線は潜水艦の平均密度を表す.右のプロットでは,青い曲線は基準深度を,オレンジ色の曲線は潜水艦の実際の深度を表している.
Wolfram System Modeler
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »