Controle de velocidade em circuito fechado de um motor CC
No controle de circuito fechado, um controlador compara essencialmente os valores desejados e reais das variáveis de interesse e ajusta o esforço de controle de modo que o valor real corresponda ao valor desejado.
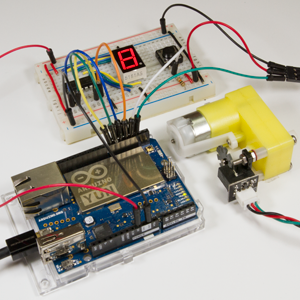
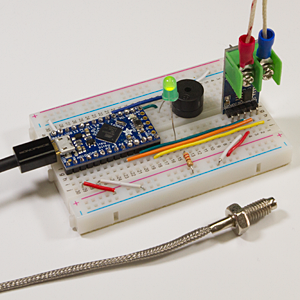
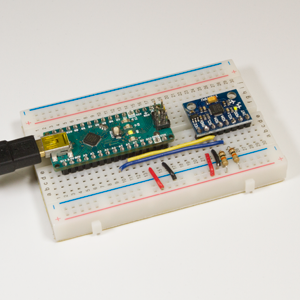
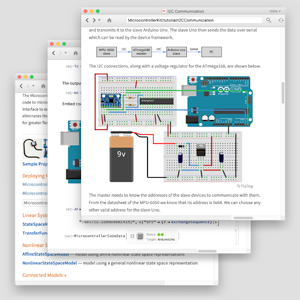
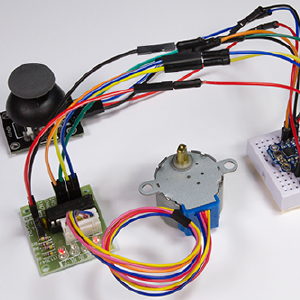
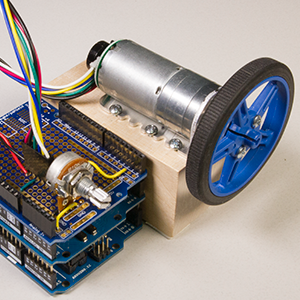
Neste exemplo, um controlador de velocidade é implantado em uma placa de microcontrolador Arduino Uno. A velocidade real do motor é medida usando um codificador. A velocidade desejada é ajustada usando um potenciômetro. O motor é alimentado usando um motor shield. Finalmente, as velocidades de referência e reais são transmitidas através de um barramento serial RS-232 que será lido usando o framework do dispositivo.
O modelo do motor CC.
Crie um controlador PID com período de amostragem 0,25 segundos.
O codificador fornece 12 pulsos por rotação e a caixa de engrenagens do motor possui uma relação de transmissão de 9,86. Crie um modelo que obtenha as leituras do codificador em rpm.
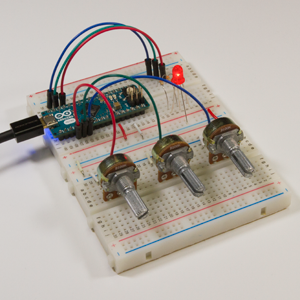
A referência é definida na faixa de 0–5V através de um potenciômetro. Faça uma nova escala para ler de 0 a 500 rpm.
O comparador para comparar a velocidade de referência e a velocidade real do codificador.
A saída do microcontrolador para o motor é baseada no ciclo de trabalho do sinal PWM. A tensão real no motor vem da placa do motor. A seguir, é apresentada a relação entre a tensão e o ciclo de trabalho, com base em um ajuste por partes dos dados medidos.
O modelo inverso da placa que mapeia a tensão para o ciclo de serviço.
O diagrama de blocos do Arduino, placa, motor e as entradas e saídas.
O controlador a ser implantado no Arduino possui 2 entradas e 3 saídas.
A primeira entrada é a velocidade de referência definida pelo valor do potenciômetro. A segunda entrada é a velocidade real medida pelo codificador.
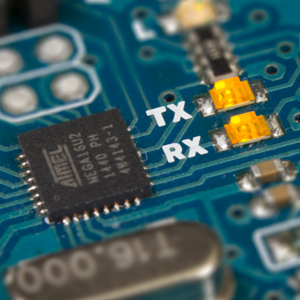
A primeira saída é o ciclo de trabalho do sinal PWM que aciona o motor. Os outros dois são a referência e a velocidade real transmitida por uma conexão serial RS-232.
Implemente o código.
Abra uma conexão serial com o destino.
Configure uma tarefa agendada para ler os valores a cada 0,25 segundos.
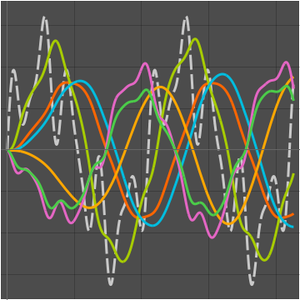
Faça um gráfico dos resultados mostrando a resposta para definir valores de referência e distúrbios.
Exclua a tarefa e feche a conexão do dispositivo.