Controle de posição de malha aberta de um motor de passo
No controle de malha aberta, o controlador não extrai suas informações do sistema controlado, não recebendo portanto feedback do sistema. O esforço do controle é ajustado por outro sistema ou manualmente por um operador humano.
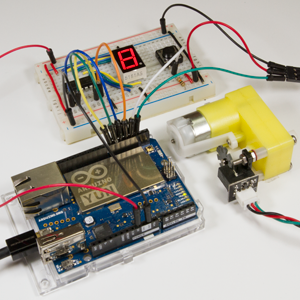
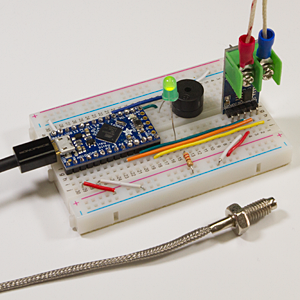
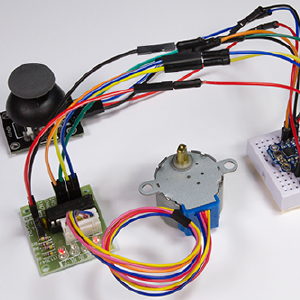
Neste exemplo, um joystick é usado para especificar o número de etapas e a direção de rotação de um motor de passo 28BYJ48. Um microcontrolador Adafruit Trinket aplicará a sequência de pulsos necessária com base na medição do joystick. O mapeamento de pinos do microcontrolador e a sequência de pulsos do motor de passo são descritos em uma biblioteca externa. O código na biblioteca externa, bem como o código gerado, serão utilizados para obter o controle de malha aberta do motor de passo.
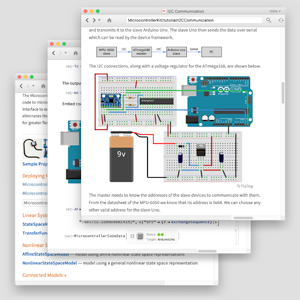
O diagrama de fiação das conexões.
A revolução completa de 512 etapas pode ser dividida em incrementos menores.
Escolha 8 etapas por incremento.
Deixe o movimento para a frente do joystick acima de 3V resultar em um incremento do motor.
Deixe um valor abaixo de 1V resultar em um incremento na direção oposta.
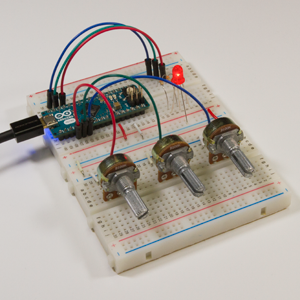
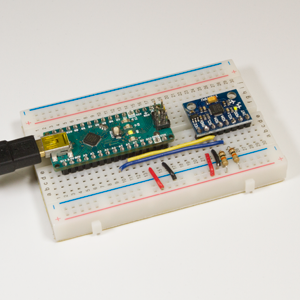
Monte o controlador de malha aberta.
A entrada do joystick.
A saída é gerenciada pela biblioteca externa e usa os pinos 0–3 do Trinket.
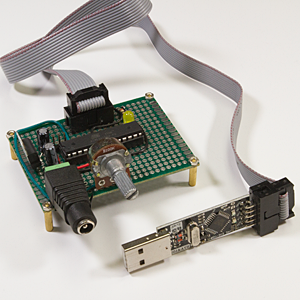
A especificação completa do microcontrolador.
O trinket usa o programador USBtiny.
A localização da biblioteca.
Faça o upload do código. Pode ser necessário desconectar a entrada do joystick antes de fazer o upload.