Controladores de design
Controladores podem ser encontrados em tudo, desde foguetes durante decolagem até arranha-céus e Segways. Ao combinar o framework do sistema de controle da Wolfram Language com os modelos do sistema, os sistemas de controle podem ser facilmente projetados e testados. Neste exemplo, um controlador para manter um Segway na posição vertical é projetado com base em uma representação linearizada do modelo.
Linearize um modelo de Segway ao redor da posição vertical usando os valores iniciais do modelo e extraia as variáveis de estado que você está interessado.
Defina variáveis de peso para o design de controle. Use uma penalidade grande para desvios no ângulo do Segway (revolute1.phi).
Calcule os ganhos para o controlador LQ.
Salve os valores computados do controlador LQ em um modelo com um controlador.
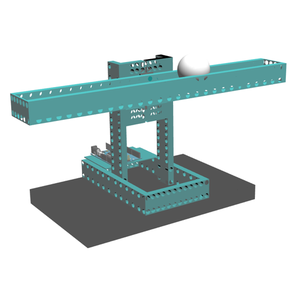
Com os parâmetros de controle salvos no modelo, mostre uma animação 3D no SystemModeler.