Implemente controlador no hardware
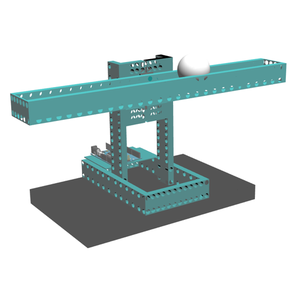
Combinando com o Microcontroller Kit, você pode gerar e implantar código rapidamente em um microcontrolador para que ele possa operar como um controlador independente. Neste exemplo, um controlador para equilibrar uma bola em uma viga é projetado e implantado.
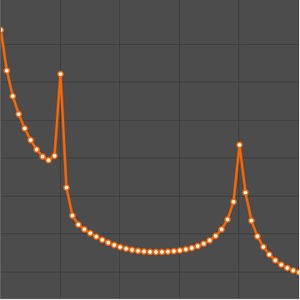
Encontre uma representação de espaço de estado linearizado da relação entre a posição e a velocidade da bola e o ângulo do feixe.
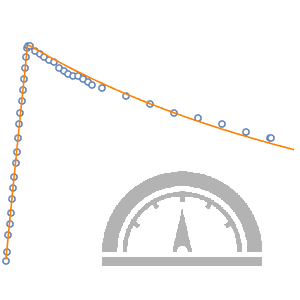
Calibre modelos para os componentes de hardware e obtenha suas funções de transferência. Você pode consultar o Microcontroller Kit no Documentation Center e seguir as instruções passo a passo.
Obtenha as funções de transferência para o sensor IR, servo e potenciômetro.
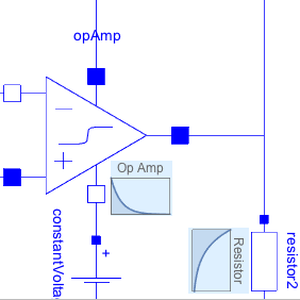
Limite os movimentos extremos do servo e modele o comparador e um componente que transforme a saída do PID na entrada servo adequada.
Obtenha um controlador PID usando os recursos de ajuste automático, com base no modelo linearizado.
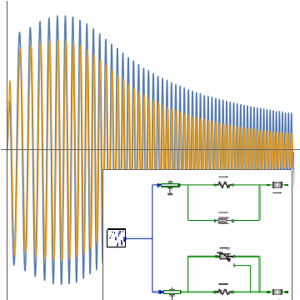
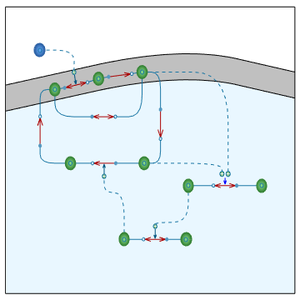
Conecte os componentes de hardware modelados e crie um modelo de feedback com o controlador PID.
Defina as configurações específicas da máquina para se comunicar com a placa do Arduino Uno.
Configure a biblioteca servo e as conexões para os pinos no Arduino.
Defina o período da amostragem.
Implemente o controlador no Arduino Uno.