iRobot Createを動かす
iRobot Createシリアルデバイスへの接続を開く.
| In[1]:= | X |
| Out[1]= |  |
iRobotコマンドの集合を定義する.
| In[2]:= | 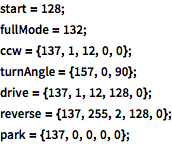 X |
"start"コマンドを送ってから"fullMode"コマンドを送る.これでロボットはドライブコマンドに反応する準備ができる.
| In[3]:= | X |
| In[4]:= | X |
ロボットに「反時計回りに90°回転」,「5秒間進む」,「反対を向く」,「5秒間進む」,「止まる」という一連のコマンドを送る.
| In[5]:= | 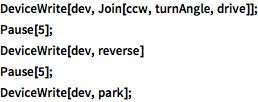 X |