Dirija um iRobot Create
Abra uma conexão com um dispositivo serial iRobot Create.
| In[1]:= | X |
| Out[1]= |  |
Defina um conjunto de comandos iRobot.
| In[2]:= | 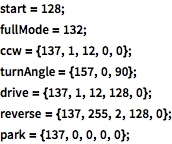 X |
Mande um comando de "start" seguido por um comando de "full mode on". Isso faz com que o robô esteja pronto para responder a comandos de direção.
| In[3]:= | X |
| In[4]:= | X |
Mande ao robô uma sequencia de comandos para virar em sentido anti-horário em 90°, seguir por 5 segundos, inverter-se, seguir por 5 segundos e, finalmente, parar.
| In[5]:= | 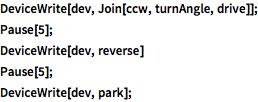 X |