Bras robotique Arduino
La bibliothèque Model Plug de Wolfram vous permet de connecter vos modèles de simulation au monde réel en utilisant des cartes Arduino, augmentant ainsi la capacité de prototypage rapide dans System Modeler. Ici, nous allons montrer comment vous pouvez utiliser Model Plug pour contrôler de manière interactive un bras de robot à partir d’un panneau de commande.
Combinaison de modèles de simulation et de matériel réel
Les modèles utilisés dans cet exemple ont été créés avec la bibliothèque Model Plug et les blocs de base de la bibliothèque standard de Modelica. Grâce à la caractéristique très utile de la connexion du matériel à System Modeler, aucun codage manuel n’est requis, il faut seulement une modélisation graphique par glisser-déposer, ce qui rend le prototypage rapide plus simple et plus efficace.
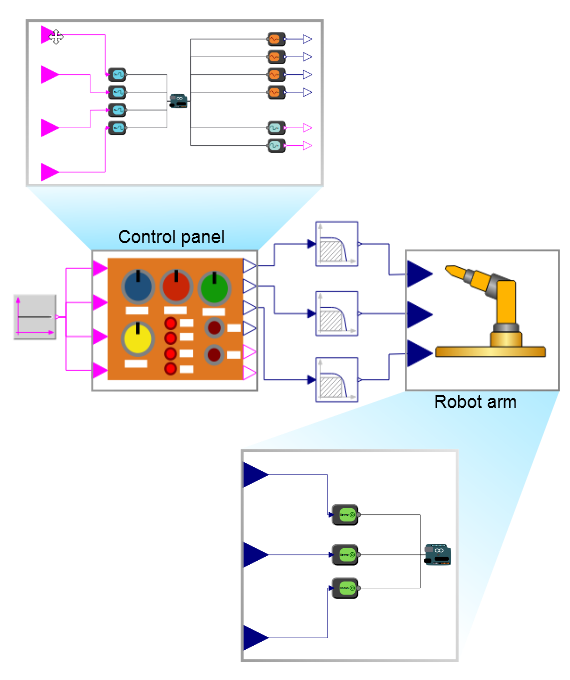
Le modèle de simulation tel qu’on le voit dans le schéma du modèle au centre, avec les modèles du panneau de commande et du bras du robot développés. Les filtres continus de Modelica.Blocks sont utilisés pour filtrer les signaux du panneau de commande et ainsi obtenir des transitions plus douces lorsque le bras du robot se déplace d’une position à l’autre.
Le modèle de simulation contient, en plus des blocs de la bibliothèque standard de Modelica, un modèle de panneau de commande et un modèle de bras de robot qui sont tous deux basés sur des composantes de la bibliothèque Model Plug entre autres. Le modèle du panneau de commande est relié à un panneau de commande physique par un port USB sur l’ordinateur. Le numéro de port est défini comme paramètre dans le modèle (voir ci-dessous). Le prototype de bras robotique physique est connecté au modèle de bras robotique de la même manière.
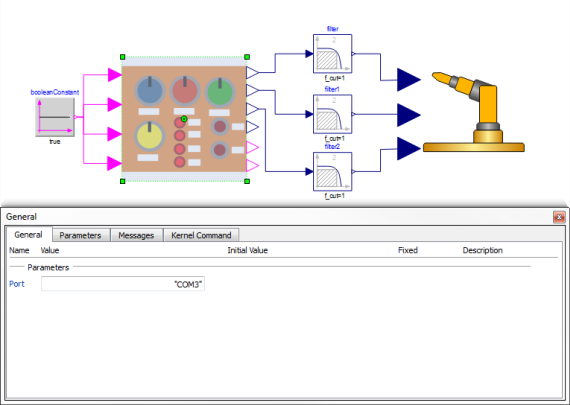
Le panneau de commande physique est connecté au modèle de panneau de commande en spécifiant le paramètre du port qui dans ce cas est « COM3 ».
Interactivité en temps réel
Avec le modèle de simulation et le matériel mis en place, nous pouvons maintenant simuler le modèle et utiliser les boutons du panneau de commande physique pour contrôler les mouvements du bras du robot, le tout en temps réel.
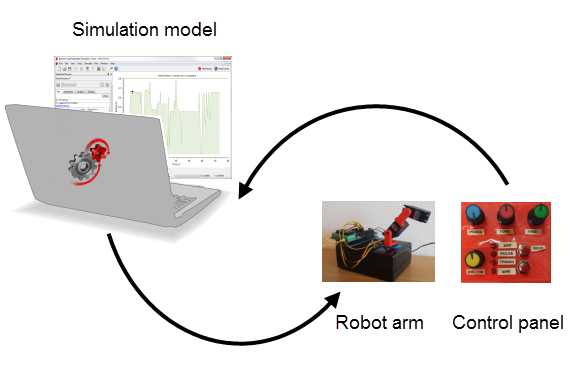
Le dispositif expérimental avec matériel (panneau de commande, bras robotique) et logiciel (modèle de simulation dans System Modeler).
Regardez la vidéo ci-dessous pour voir comment le panneau de commande est utilisé pour diriger le bras du robot en utilisant System Modeler et le modèle de simulation comme interface entre eux.
Trois boutons différents sur le panneau de commande sont utilisés pour contrôler les trois servomoteurs différents, chacun ayant une plage angulaire de 0 à 180 degrés. Chaque tracé visible sur l’écran de l’ordinateur portable correspond au signal émis par l’un des servomoteurs.
Wolfram System Modeler
Essayez
Achetez
System Modeler est disponible en anglais
et en japonais
sur Windows, macOS et Linux »
Vous avez des questions ou des commentaires ? Contactez un expert Wolfram »