Arduinoのロボットアーム
Wolfram Model Plugライブラリでは,Arduinoボードを使ってシミュレーションモデルを現実世界に接続することが可能なので,System Modelerでより高速なプロトタイプ作成機能が実現できます.ここではModel Plugを使ってコントロールパネルからロボットアームをインタラクティブに制御する方法をお見せします.
シミュレーションモデルと実際のハードウェアを組み合せる
この例で使用されているモデルは,Model PlugライブラリとModelica標準ライブラリの基本ブロックを使用して作成されました.ハードウェアをSystem Modelerに接続する際の非常に便利な機能は,手動のコーディングが不要で,グラフィカルなドラッグアンドドロップによるモデリングのみで済むことです.これにより,高速のプロトタイプ化がより簡単かつ効率的に行えます.
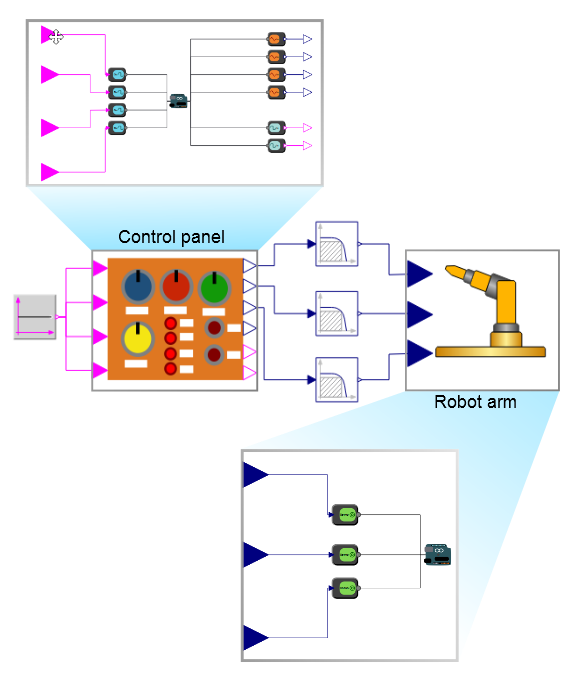
Model Centerのダイアグラム ビューに表示されるシミュレーションモデル.コントロールパネルとロボットアームのモデルが拡張されている.Modelica.Blocksの連続フィルターを使用してコントロールパネルからの信号をフィルター処理するため,ロボットアームがある位置から別の位置に移動するときに,よりスムーズな移動が実現できる.
シミュレーションモデルには,Modelica標準ライブラリのブロックの他に,Model Plugライブラリのコンポーネントに基づくコントロールパネルモデルとロボットアームモデルが含まれています.コントロールパネルモデルは,コンピュータのUSBポートを介して物理的なコントロールパネルに接続されます.ポート番号はモデル内のパラメータとして設定されます(以下を参照).物理的なロボットアームプロトタイプも,同じ方法でロボットアームモデルに接続されます.
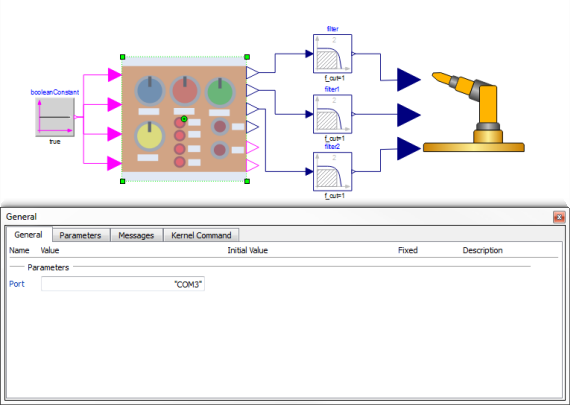
物理的コントロールパネルは,Port パラメータ(この場合は「COM3」)を指定することによってコントロールパネルモデルに接続される.
リアルタイムのインタラクティブ機能
シミュレーションモデルとハードウェアを設定したら,モデルのシミュレーションを行い,物理コントロールパネルのノブを使用してロボットアームの動きがすべてリアルタイムで制御できるようになります.
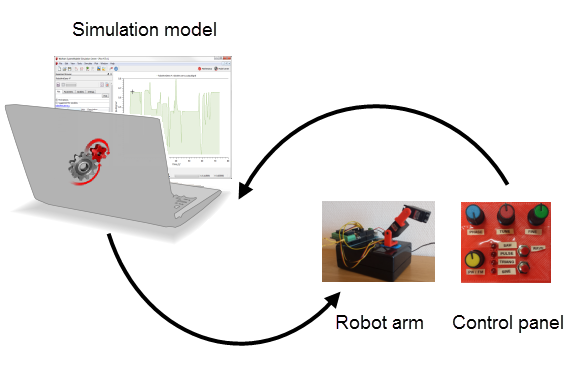
ハードウェア(コントロールパネル,ロボットアーム)とソフトウェア(System Modelerのシミュレーションモデル)を使用した実験の設定
以下の動画を見ると,System Modelerとシミュレーションモデルをインターフェースとして使い,コントロールパネルでロボットアームを操作する方法が分かります.
コントロールパネルの 3 つの異なるノブを使用して,それぞれ0~180度の角度範囲を持つ3つの異なるサーボモーターを制御する.ラップトップスクリーンに表示される各プロットは,サーボのうちの一つからの信号に対応する.
Wolfram System Modeler
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »