牽引と滑空
大気中の航空機の飛行をモデル化しシミュレーションを作成します.この例ではグライダーが別の飛行機によって滑空高度まで引き上げられ,解放されます.
グライダーと電気飛行機のモデル
グライダーと電動飛行機は自動操縦装置に接続されています.巡航高度に達するまで,両方の自動操縦装置に同じ基準軌道が与えられます.巡航高度に達するとグライダーは解放され,独自の軌道を辿ります.長さがパラメータ化された牽引ロープがグライダーと飛行機を接続します.
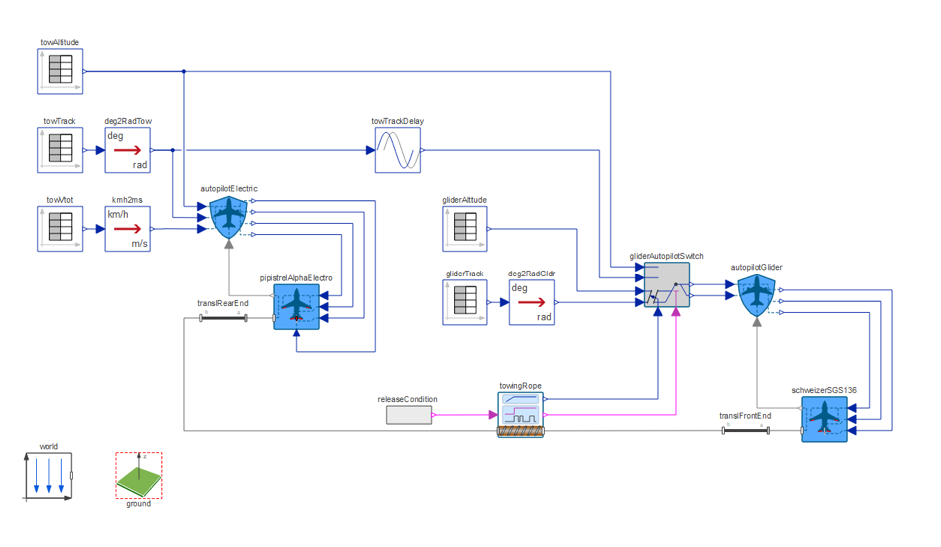
グライダーは初期高度100m(328フィート)から電気飛行機によって2,000m(6,562フィート)まで牽引される.
飛行応答のチェック
グライダーは約13.5分で巡航高度に到達し,その後グライダーは解放され降下命令が与えられます.約15分ごろグライダーは一定時間一定高度で飛行するように命令されます.最終的にグライダーの高度と速度の両方が振動し始めます.これは速度が低下した状態では所定の高度を維持できないため起こります.振動は,グライダーが降下する基準高度命令に追いつくと終了します.
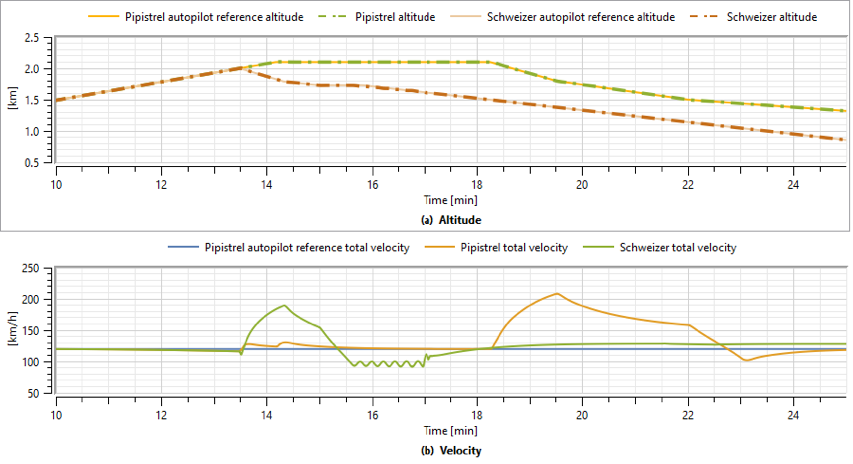
PipistrelとSchweizerはそれぞれ電動飛行機とグライダーを表す.上のプロットは高度を,下のプロットは速度を示している.
Wolfram System Modeler
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »