DCモーターの速度制御
速度制御メカニズムは,エレベータの動きの監視から自律走行車の運転まで,さまざまな分野で使われています.この例ではDCモーターの速度制御器の作成方法のワークフローを示します.
モデルの作成
DCモーターのモデルをグラフィックスまたはプログラムを使って作成します.
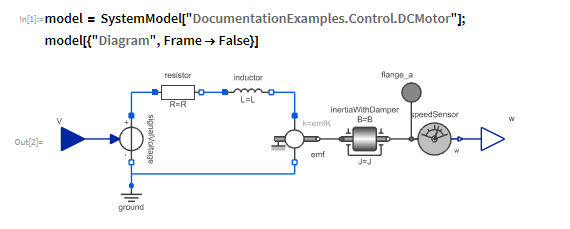
System ModelerのDCモーターの組込みの例はWolfram言語でロードされる.
モデルの線形化
平衡状態付近でモデルを線形化します.
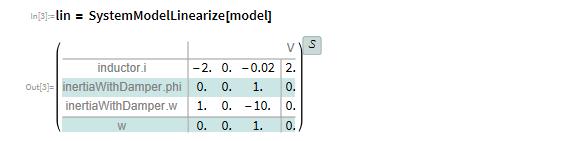
DCモーターの線形化された状態空間表現が得られる.
制御器の作成
制御系の機能を使って制御器を作成します.

外乱を外乱を除去したり,基準の変化に追従したりするのに優れたPID制御器が作成される.
制御器の接続
制御器を閉ループのモデルに自動的に接続して,制御されたシステムを作成します.
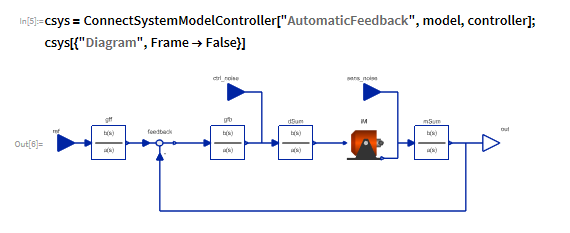
PID制御器は自動的にDCモーターと接続される.
制御されたシステムをテストする
基準入力と一組の外乱について,制御されたシステムをテストします.
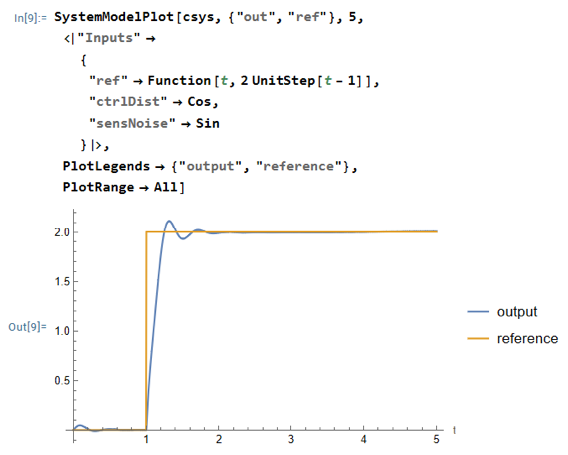
DCモーターは基準速度に達し,外乱があるにも関わらずその速度を維持する.
Wolfram System Modeler
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »