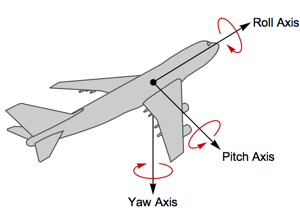
오일러 회전
버전 11은 이동 좌표 프레임에 대한 회전 순서를 나타내는 EulerMatrix를 도입하였습니다.
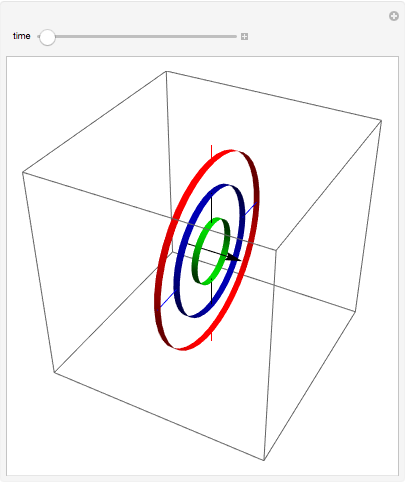
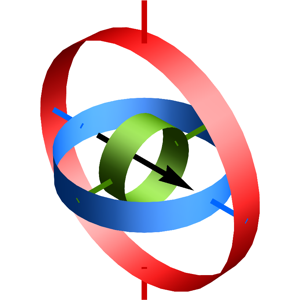
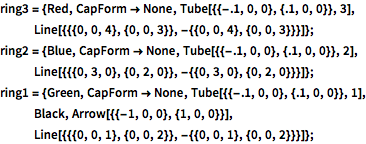
짐벌 모델을 작성합니다. 각 오일러 각은 각 축 회전의 상대 각도입니다.
전체 Wolfram 언어 입력 표시하기
In[2]:=
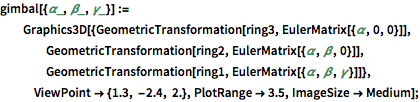
gimbal[{\[Alpha]_, \[Beta]_, \[Gamma]_}] :=
Graphics3D[{GeometricTransformation[ring3,
EulerMatrix[{\[Alpha], 0, 0}]],
GeometricTransformation[ring2,
EulerMatrix[{\[Alpha], \[Beta], 0}]],
GeometricTransformation[ring1,
EulerMatrix[{\[Alpha], \[Beta], \[Gamma]}]]},
ViewPoint -> {1.3, -2.4, 2.}, PlotRange -> 3.5,
ImageSize -> Medium];In[3]:=
gimbalframes = Table[gimbal[{i, i, i}], {i, 0, 2 Pi, Pi/32}];In[4]:=
Manipulate[
gimbalframes[[i]], {{i, 1, "time"}, 1, Length[gimbalframes], 1},
SaveDefinitions -> True]Out[4]=