Углы Эйлера
Версия 11 предлагает ресурс EulerMatrix, который может использоваться для описания последовательности вращений объекта относительно подвижной системы координат.
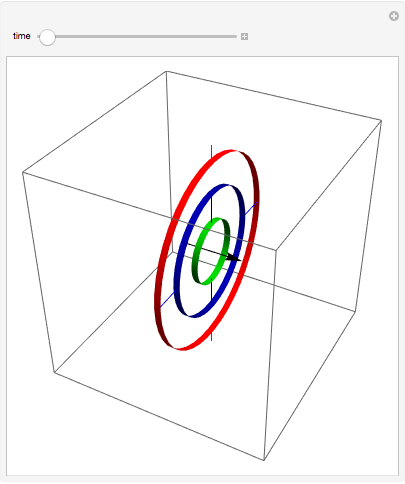
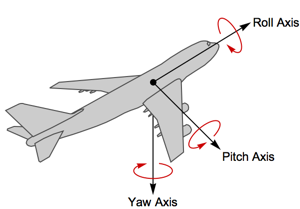
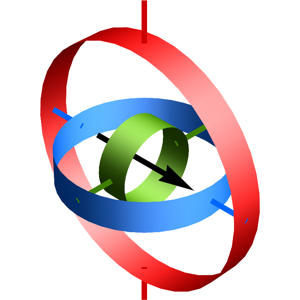
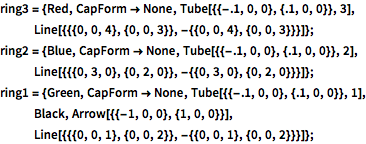
Смоделируем карданный подвес. Каждый угол Эйлера представляет собой относительный угол поворота осей карданного подвеса.
код на языке Wolfram Language целиком
In[2]:=
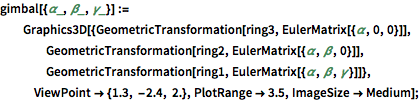
gimbal[{\[Alpha]_, \[Beta]_, \[Gamma]_}] :=
Graphics3D[{GeometricTransformation[ring3,
EulerMatrix[{\[Alpha], 0, 0}]],
GeometricTransformation[ring2,
EulerMatrix[{\[Alpha], \[Beta], 0}]],
GeometricTransformation[ring1,
EulerMatrix[{\[Alpha], \[Beta], \[Gamma]}]]},
ViewPoint -> {1.3, -2.4, 2.}, PlotRange -> 3.5,
ImageSize -> Medium];In[3]:=
gimbalframes = Table[gimbal[{i, i, i}], {i, 0, 2 Pi, Pi/32}];In[4]:=
Manipulate[
gimbalframes[[i]], {{i, 1, "time"}, 1, Length[gimbalframes], 1},
SaveDefinitions -> True]Out[4]=