Moment d'inertie
Explorez les nouvelles capacités couvrant les paramètres physiques d'un corps rigide incluant l'inertie de rotation.
In[1]:=
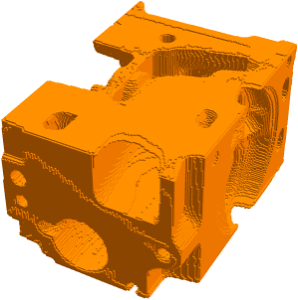
wrench = ExampleData[{"Geometry3D", "Wrench"}, "Region"]Out[1]=

Choisissez un point autour duquel la clé doit tourner.
In[2]:=
point = {-8, -0.168, 0};In[3]:=
Show[wrench, Graphics3D[{PointSize[Large], Point[point]}],
ViewPoint -> {0, -\[Infinity], 0}]Out[3]=

La matrice d'inertie est centrée sur ce point.
In[4]:=
\[ScriptCapitalI] = MomentOfInertia[wrench, point]Out[4]=
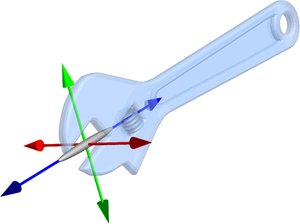
Trouvez les principaux axes, les axes autour desquels un corps a tendance à tourner.
In[5]:=
principalaxes = Eigenvectors[\[ScriptCapitalI]]Out[5]=
Trouvez l'ellipsoïde d'inertie dont les rayons indiquent la résistance relative à l'accélération autour d'un axe principal.
In[6]:=
inertiaellipsoid = Ellipsoid[point, 1000 Inverse[\[ScriptCapitalI]]]Out[6]=
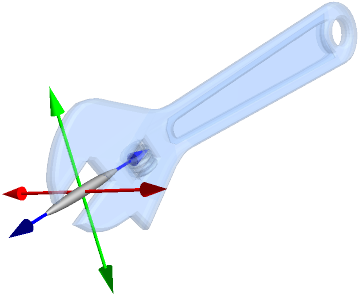
Affichez la clé avec ses principaux axes et l'ellipsoïde d'inertie. Le bras de la clé étire l'ellipsoïde le long de son axe.
Afficher l'entrée complète de Wolfram Language
In[8]:=
Show[wrench, axes, BaseStyle -> Opacity[0.3]]Out[8]=