Momento de inércia
Explore os novos recursos que abrangem parâmetros físicos de um corpo rígido, incluindo a inércia rotacional.
In[1]:=
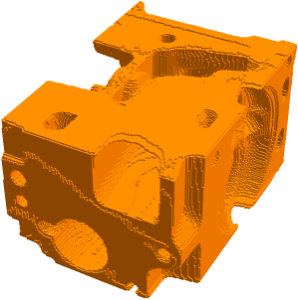
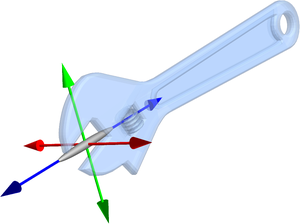
wrench = ExampleData[{"Geometry3D", "Wrench"}, "Region"]Out[1]=

Selecione um ponto para a chave gire ao redor.
In[2]:=
point = {-8, -0.168, 0};In[3]:=
Show[wrench, Graphics3D[{PointSize[Large], Point[point]}],
ViewPoint -> {0, -\[Infinity], 0}]Out[3]=

A matriz de inércia é centrada neste ponto.
In[4]:=
\[ScriptCapitalI] = MomentOfInertia[wrench, point]Out[4]=
Encontre os eixos principais, os eixos que um corpo tende a girar em torno.
In[5]:=
principalaxes = Eigenvectors[\[ScriptCapitalI]]Out[5]=
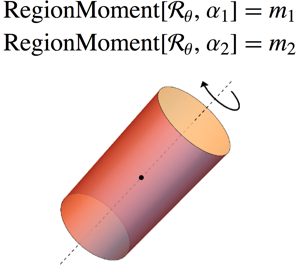
Encontre o elipsóide de inércia cujos raios indicam a resistência relativa para acelerar ao redor de um eixo principal.
In[6]:=
inertiaellipsoid = Ellipsoid[point, 1000 Inverse[\[ScriptCapitalI]]]Out[6]=
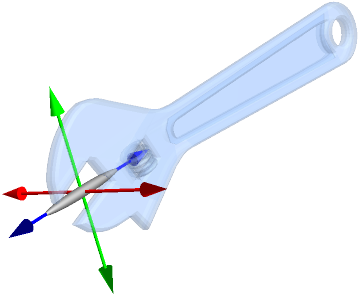
Mostre a chave com os seus eixos principais e o elipsóide inércia. O braço da chave estende o elipsóide ao longo de seu eixo.
mostre o input completo da Wolfram Language

In[8]:=
Show[wrench, axes, BaseStyle -> Opacity[0.3]]Out[8]=