Analytic Center
A convex polygon can be represented as intersections of half-planes  . The analytic center can be defined as a point inside the polygon that maximizes the product of distances to the sides. The distance of a point
. The analytic center can be defined as a point inside the polygon that maximizes the product of distances to the sides. The distance of a point  in the polyhedron to each side is
in the polyhedron to each side is  , and so the analytic center is
, and so the analytic center is  , which maximizes
, which maximizes  .
.
This example demonstrates how exponential cone constraints may be used with ConicOptimization to find the analytic center, as well as how the inequality representation for a polygon may be extracted using LinearOptimization.
Take a convex polygon.
Extract the coefficients  for each side.
for each side.
The scalar inequalities corresponding to the polygon are:
To express the problem as a convex minimization, take  and negate the objective
and negate the objective  . The transformed objective is
. The transformed objective is  .
.
Because a sum of logarithms is concave, the negation is convex, and so an auxiliary variable  can be introduced as the objective function with
can be introduced as the objective function with  subject to the constraint
subject to the constraint  .
.
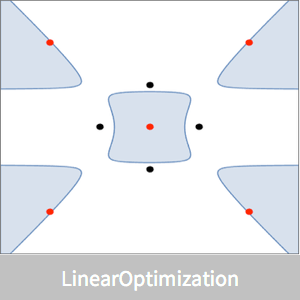
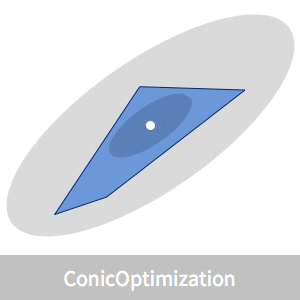
Visualize the location of the analytic center.
There are simple formulas that give the inscribed and covering ellipsoids that are centered at the analytic center.