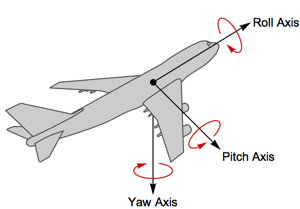
Momento de inercia
Explore las nuevas capacidades que abarcan parámetros físicos de un cuerpo rígido, incluyendo la inercia rotacional.
In[1]:=
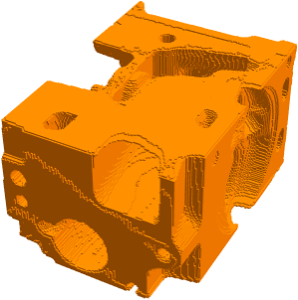
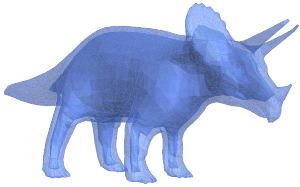
wrench = ExampleData[{"Geometry3D", "Wrench"}, "Region"]Out[1]=

Seleccione un punto para que la llave gire alrededor de él.
In[2]:=
point = {-8, -0.168, 0};In[3]:=
Show[wrench, Graphics3D[{PointSize[Large], Point[point]}],
ViewPoint -> {0, -\[Infinity], 0}]Out[3]=

La matriz de inercia está centrada en este punto.
In[4]:=
\[ScriptCapitalI] = MomentOfInertia[wrench, point]Out[4]=
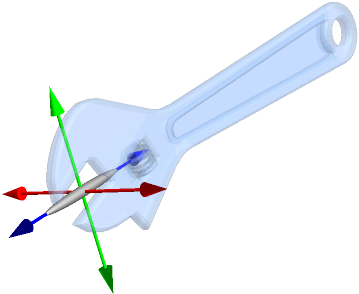
Encuentre los ejes principales, los ejes sobre los que el cuerpo tiende a rotar.
In[5]:=
principalaxes = Eigenvectors[\[ScriptCapitalI]]Out[5]=
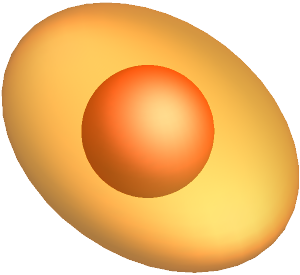
Encuentre el elipsoide de inercia cuyos radios indican la resistencia relativa para acelerar alrededor de un eje principal.
In[6]:=
inertiaellipsoid = Ellipsoid[point, 1000 Inverse[\[ScriptCapitalI]]]Out[6]=
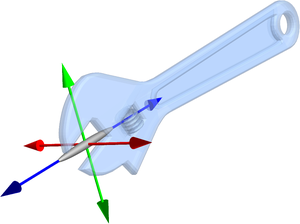
Muestre la llave con sus ejes principales y el elipsoide de inercia. El brazo de la llave estira el elipsoide a lo largo de su eje.
muestre la entrada completa de Wolfram Language
In[8]:=
Show[wrench, axes, BaseStyle -> Opacity[0.3]]Out[8]=