Régulation de position en boucle ouverte d'un moteur pas à pas
Dans un circuit en boucle ouverte, le régulateur effectue une action de régulation sans que le système ne réagisse à l'action de régulation. L'effort de régulation est réglé par un autre système ou bien manuellement par un opérateur humain.
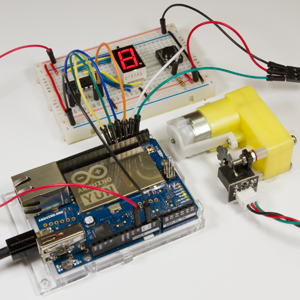
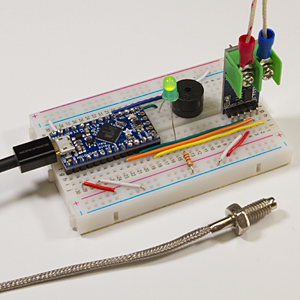
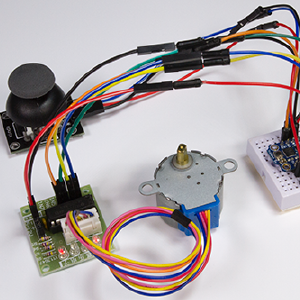
Dans cet exemple, un joystick est utilisé pour déterminer le nombre de pas et le sens de rotation d'un moteur pas à pas 28BYJ48. Un microcontrôleur Adafruit Trinket appliquera la séquence d'impulsions requise en fonction de la mesure du joystick. Le brochage du microcontrôleur et la séquence d'impulsions du moteur pas à pas sont décrits dans une bibliothèque externe. Le code de la bibliothèque externe ainsi que le code généré seront utilisés pour obtenir le contrôle en boucle ouverte du moteur pas à pas.
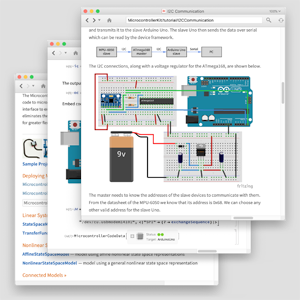
Le schéma de câblage des connexions.
Le tour complet de 512 pas peut être divisé en plus petits incréments.
Choisissez 8 pas par incrément.
Positionnez le mouvement avant du joystick au-dessus de 3 V pour obtenir un incrément du moteur.
Si la valeur est inférieure à 1 V, on obtient un incrément dans la direction opposée.
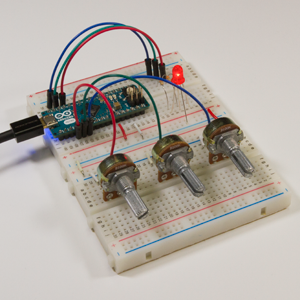
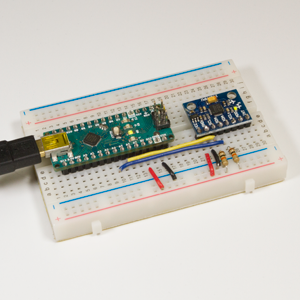
Assemblez le régulateur à boucle ouverte.
L'entrée du joystick.
La sortie est gérée par la bibliothèque externe et utilise les broches 0-3 du boîtier.
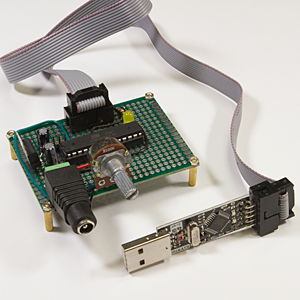
Les caractéristiques complètes du microcontrôleur.
Le boîtier utilise le programmateur USBtiny.
L'emplacement de la bibliothèque.
Téléchargez le code. Il se peut que vous deviez déconnecter l'entrée du joystick avant de télécharger.