Sistemas no lineales generales
Así como los sistemas afines, los sistemas generales no lineales puede también ser especificados de varias formas y pueden ser convertidos a otros modelos de sistemas.
Un modelo especificado usando un ODE.
| In[1]:= | X |
| Out[1]= | 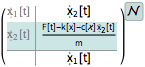 |
Un sistema especificado usando sus componentes.
| In[2]:= | X |
| Out[2]= | 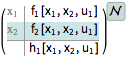 |
Sistemas obtenidos de otros modelos de sistemas.
| In[3]:= |  X |
| Out[3]= |  |
| In[4]:= |  X |
| Out[4]= | 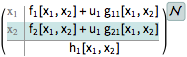 |
Un NonlinearStateSpaceModel lineal es exactamente convertido a modelos de sistemas lineales.
| In[5]:= |  X |
| In[6]:= | X |
| Out[6]= | 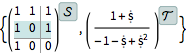 |
Un sistema de entrada lineal es exactamente convertido a un AffineStateSpaceModel.
| In[7]:= | 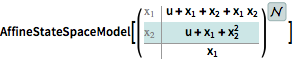 X |
| Out[7]= | 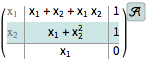 |
En general, las conversiones a otros modelos de sistemas son aproximadas.
| In[8]:= | 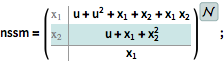 X |
| In[9]:= | X |
| Out[9]= |  |




















