Controllability Decomposition
The controllability decomposition reveals the inner structure and the reachable subspace of the system. The subspace can be visualized for second- and third-order systems and in general is a manifold.
An affine system. »
| In[1]:= | 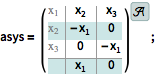 X |
Its reachable subspace is a sphere.
| In[2]:= | X |
| In[3]:= | X |
| Out[3]= |
The transformation reveals that it is confined to a specific sphere because  .
.
| In[4]:= | X |
| Out[4]= | 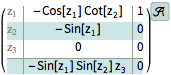 |
The system starts and remains on the same sphere for all inputs.
| In[5]:= | 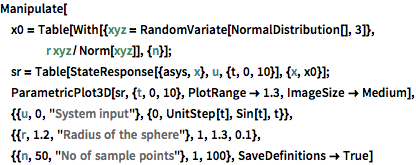 X |
|





















