Controllability
A car with two trailers is controllable. The approximately linearized model fails to reveal the controllability, while the affine model does. »
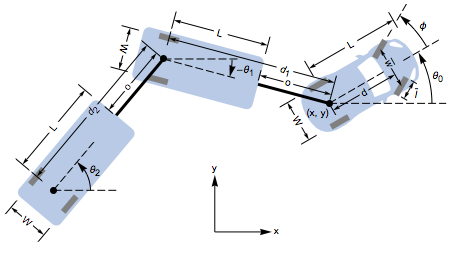 |
The affine model.
| In[1]:= | 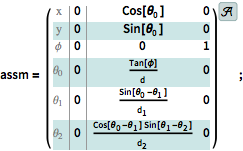 X |
The linear model is not controllable.
| In[2]:= | X |
| Out[2]= |  |
| In[3]:= | X |
| Out[3]= |
The affine model shows that the system is controllable.
| In[4]:= | X |
| Out[4]= |
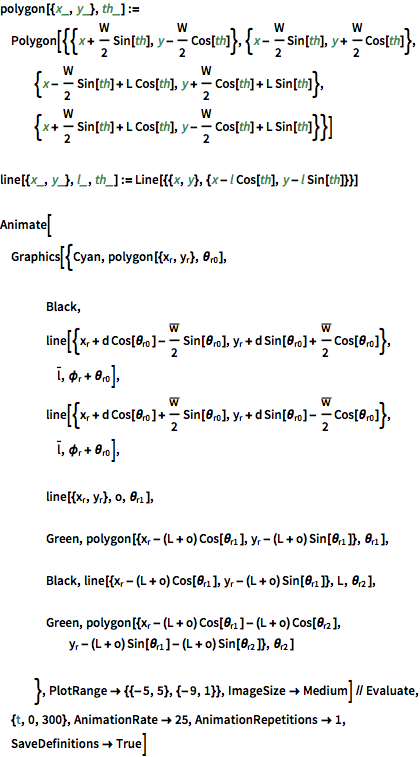
Simulate the affine system for a set of input signals.
| In[5]:= | X |
| In[6]:= |  X |
Visualize its motion.
|





















