‹›Mehr GeometrieRoll-Nick-Gier-Rotationen
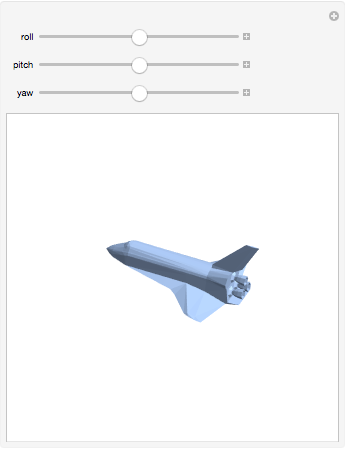
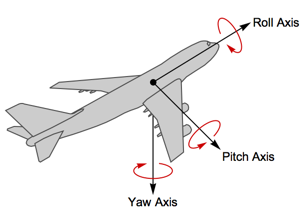
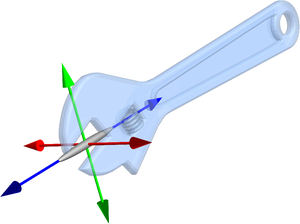
Version 11 bietet mit RollPitchYawMatrix eine Möglichkeit, eine Folge von Drehungen im Bezug auf einen fixierten Bezugsrahmen zu beschreiben. Diese Funktion wird häufig verwendet, um die Rotationen von Starrkörpern in den Bereichen Robotik und Raumfahrt zu modellieren.
Den kompletten Wolfram Language-Input zeigen
iShow[trans_] :=
Show[trans, Method -> {"ShrinkWrap" -> False}, PlotRange -> 8,
ImageSize -> {300, 300}];
plane = ExampleData[{"Geometry3D", "SpaceShuttle"}, "Region"];
Manipulate[
iShow[TransformedRegion[plane,
AffineTransform@RollPitchYawMatrix[{r, p, y}, {1, 2, 3}]]], {{r, 0,
"roll"}, -Pi, Pi, Pi/32}, {{p, 0, "pitch"}, -Pi, Pi,
Pi/32}, {{y, 0, "yaw"}, -Pi, Pi, Pi/32}, SaveDefinitions -> True]