4分の1車のサスペンションモデルのHILシミュレーション
HIL (Hardware-in-the-Loop) シミュレーションは,実際の物理システムのテストが危険だったり高価だったり,あるいは選択肢になかったりする場合に便利な開発ツールである.HILシミュレーションでは,物理システムのモデルのシミュレーションがリアルタイムで行われる.
完全なWolfram言語入力を表示する
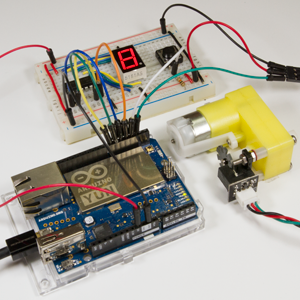
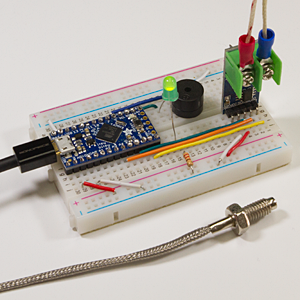
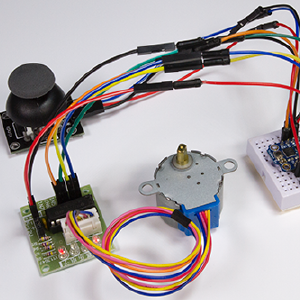
この例では,1/4の車のサスペンションシステムのモデルを離散化してAdafruit Metro Miniに配備する.ボードのピンA3に接続されたジョイスティックを使って,ボードで実行されているHILシミュレーションの基準道路入力が指定される.最後に,デバイスのフレームワークから得られたデータを使ってシステムのリアルタイムの応答が可視化される.
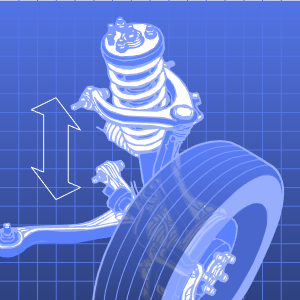
システムの自由体図.
パラメータ.
入力  と出力
と出力  ,
, ,
, を持つモデル.
を持つモデル.
モデルを離散化する.
ジョイスティックは0Vから4.85Vまで(デフォルトは2.44V)の値を読む.値をスケールし直して 単位から1単位までの基準入力を得る.
単位から1単位までの基準入力を得る.
ジョイスティックのモデル.
入力としてのジョイスティックと出力  ,
, ,
, を持つ完全システム.
を持つ完全システム.
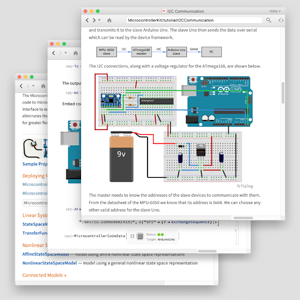
入力がアナログピンA3から来て出力がシリアルで送信されるマイクロコントローラ指定.
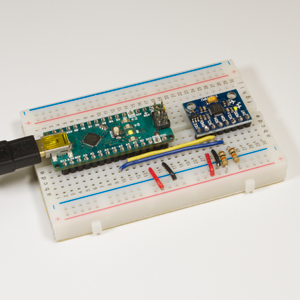
モデルを配備する.
HILシミュレーションとのシリアル接続を開く.
データを読んで解析するタスクを送信する.
完全なWolfram言語入力を表示する
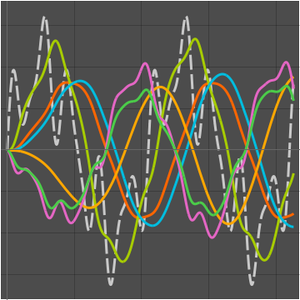
HILシミュレーションの結果.
タスクを削除してデバイスを閉じる.