再獲得モデルでトカゲの動きを追跡する
次の例では隠れマルコフモデルを使って,最もあり得るトカゲの移動パターンを再構築し,不完全な捕獲記録の列から想定されるトカゲの寿命を推測する.
トカゲは状態2,3,4により表される3つのゾーンの間を移動する.トカゲは死んだら状態1に遷移する.各トカゲに最初にタグを付けておく.
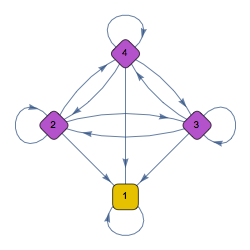 |
 のそれぞれの時間に,25匹のトカゲが捕まえられ,各トカゲのゾーンが記録されてその後解放された.記録された1,2,3は実際のゾーンに対応し,4は欠測値を表す.これはトカゲが捕まえられなかった場合や死んでいた場合を意味する.
のそれぞれの時間に,25匹のトカゲが捕まえられ,各トカゲのゾーンが記録されてその後解放された.記録された1,2,3は実際のゾーンに対応し,4は欠測値を表す.これはトカゲが捕まえられなかった場合や死んでいた場合を意味する.
| In[1]:= | X |
データから4状態4観測値の隠れマルコフ過程を推測する.
| In[2]:= | X |
| Out[2]= | 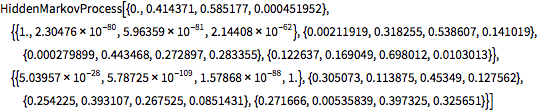 |
最初のトカゲについて,もっともあり得そうな行動パターンを見付ける.
| In[3]:= | X |
| Out[3]= |
先行する列において,状態1の「死」は吸収状態である.
| In[4]:= | X |
| Out[4]= |
死までの平均時間.
| In[5]:= | X |
| Out[5]= |