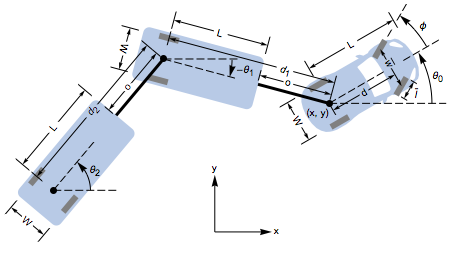
Controlabilidade
Um carro com dois reboques é controlável. O modelo aproximadamente linearizado não demonstra a controlabilidade, enquanto o modelo afim demonstra. »
 |
O modelo afim.
| In[1]:= |  X |
O modelo linear não é controlável.
| In[2]:= | X |
| Out[2]= |  |
| In[3]:= | X |
| Out[3]= |
O modelo afim mostra que o sistema é controlável.
| In[4]:= | X |
| Out[4]= |
Simula o sistema afim para um conjunto de sinais de entrada.
| In[5]:= | X |
| In[6]:= |  X |
Visualize seu movimento.

|





















