Rotaciones aleatorias
CircularRealMatrixDistribution representa una distribución uniforme de las matrices cuadradas octogonales de dimensión  , también conocidas como la medida de Haar en el grupo ortogonal
, también conocidas como la medida de Haar en el grupo ortogonal  . Las matrices generadas de acuerdo con esta distribución pueden actuar como operadores de rotación de vectores en un espacio vectorial
. Las matrices generadas de acuerdo con esta distribución pueden actuar como operadores de rotación de vectores en un espacio vectorial  -dimensional
-dimensional
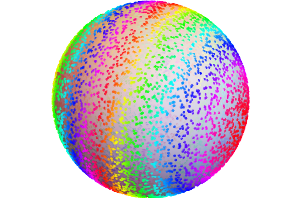
Defina una distribución de vectores aleatorios obtenidos rotando un vector en 3D fijo (0,0,1) por una matriz aleatoria de CircularRealMatrixDistribution de dimensión 3.
\[ScriptCapitalD] =
MatrixPropertyDistribution[r.{0, 0, 1},
r \[Distributed] CircularRealMatrixDistribution[3]];Use esta distribución para tomar muestra de puntos en la superficie de la unidad de esfera.
points = RandomVariate[\[ScriptCapitalD], 10^3];Compruebe si todos los puntos de muestra pertenecen a la unidad de esfera.
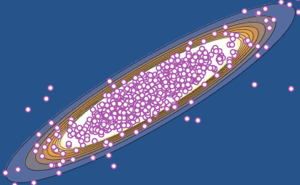
AllTrue[points, RegionMember[Sphere[3]]]Represente gráficamente los puntos muestreados con el vector original.

El elemento del área de superficie en la esfera en coordinadas cilíndricas es dado por  .
.
{x, y, z} = Transpose[points];
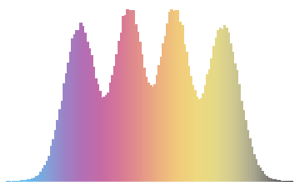
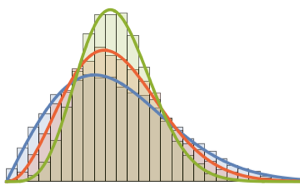
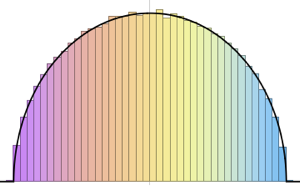
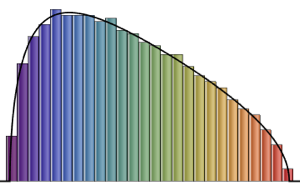
\[Phi] = ArcTan[y/x];Compruebe si las distribuciones marginales de  y
y  son uniformes.
son uniformes.
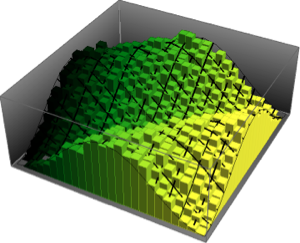
Histogram[#, 20, PDF] & /@ {\[Phi], z}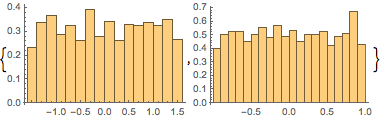
Revise si los puntos de muestra están distribuidos uniformemente en la superficie de la esfera, comprobando si la distribución conjunta de  y
y  es uniforme.
es uniforme.
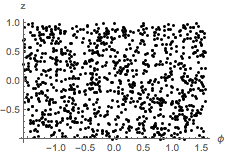
Pruebe la hipótesis de que la distribución conjunta de  y
y  es uniforme.
es uniforme.
DistributionFitTest[Transpose[{\[Phi], z}],
UniformDistribution[{{-Pi/2, Pi/2}, {-1, 1}}], "TestConclusion"]