Rotations aléatoires
CircularRealMatrixDistribution représente une loi uniforme des matrices carrées orthogonales de dimension  , également connue sous le nom de la mesure de Haar sur le groupe orthogonal
, également connue sous le nom de la mesure de Haar sur le groupe orthogonal  . Les matrices générées selon cette loi peuvent agir comme opérateurs pour les vecteurs de rotation dans un espace vectoriel de
. Les matrices générées selon cette loi peuvent agir comme opérateurs pour les vecteurs de rotation dans un espace vectoriel de  dimension.
dimension.
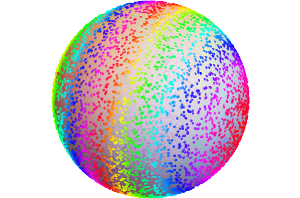
Définissez la distribution des vecteurs aléatoires obtenus par rotation d'un vecteur en 3D fixe (0,0,1) par une matrice aléatoire à partir de CircularRealMatrixDistribution de dimension 3.
\[ScriptCapitalD] =
MatrixPropertyDistribution[r.{0, 0, 1},
r \[Distributed] CircularRealMatrixDistribution[3]];Utilisez cette distribution pour échantillonner des points sur la surface de la sphère unitaire.
points = RandomVariate[\[ScriptCapitalD], 10^3];Vérifiez si tous les points d'échantillonnage appartiennent à l'unité de sphère.
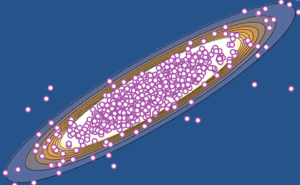
AllTrue[points, RegionMember[Sphere[3]]]Tracez les points d'échantillonnage avec le vecteur original.

L'élément de surface sur la sphère en coordonnées cylindriques est donnée par  .
.
{x, y, z} = Transpose[points];
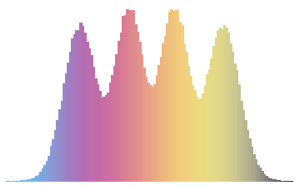
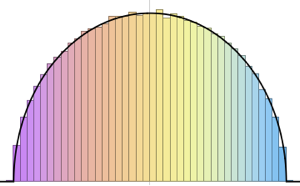
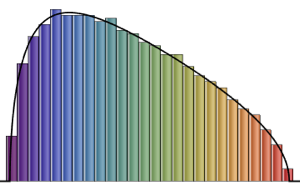
\[Phi] = ArcTan[y/x];Vérifiez que les distributions marginales de  et
et  sont uniformes.
sont uniformes.
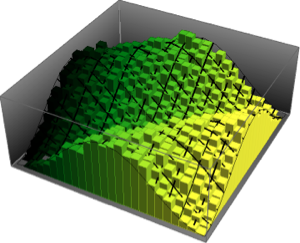
Histogram[#, 20, PDF] & /@ {\[Phi], z}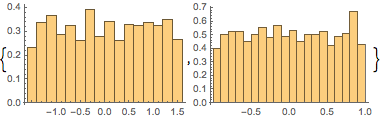
Vérifiez si les points d'échantillonnage sont distribués uniformément sur la surface de la sphère en vérifiant que la distribution conjointe de  et
et  est uniforme.
est uniforme.
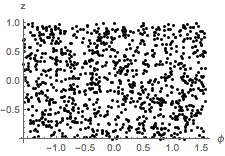
Testez l'hypothèse que la distribution conjointe de  et de
et de  est uniforme.
est uniforme.
DistributionFitTest[Transpose[{\[Phi], z}],
UniformDistribution[{{-Pi/2, Pi/2}, {-1, 1}}], "TestConclusion"]