优化凸轮的形状
在对凸轮的半径加以约束的条件下,设计凸性凸轮的形状,使凸轮旋转一周时阀门开启面积最大.
假设凸轮的形状是在其周长的  角度上半径为 rmin 的圆弧,在余下的
角度上半径为 rmin 的圆弧,在余下的 ![]() 角度上形状对称.
角度上形状对称.

设计变量 ri, i=1, …, n 表示在凸轮非圆周部分的上半部分的  的角度内,以等角距 θ 分布的凸轮半径.
的角度内,以等角距 θ 分布的凸轮半径.
In[1]:=
n = 100; vars = Array[r, n];每个半径 ri 都被约束在区间  中.
中.
In[2]:=
rmin = 1; rmax = 2;
varbounds = Table[rmin <= r[i] <= rmax, {i, 1, n}];输入上面定义的角度 θ.
In[3]:=
\[Theta] = 2 Pi/(5 (n + 1));凸性约束被表示为不等式组  .
.
In[4]:=
convexconstri = (1/2) r[i - 1] r[i + 1] Sin[2 \[Theta]] <=
(1/2) r[i - 1] r[i] Sin[\[Theta]] + (1/2) r[i] r[
i + 1] Sin[\[Theta]];通过应用  ,不等式组可重新表示如下. 注意
,不等式组可重新表示如下. 注意  为凸轮的圆周部分上一个点的半径,因而与
为凸轮的圆周部分上一个点的半径,因而与  相等.
相等.
In[5]:=
convexconstr =
Table[2 r[i - 1] r[i + 1] Cos[\[Theta]] <=
r[i] (r[i - 1] + r[i + 1]), {i, 0, n}] /. {r[-1] -> rmin,
r[0] -> rmin, r[n + 1] -> rmax};用参数 α 来表示对半径变化率的约束,其形式为  .
.
In[6]:=

\[Alpha] = 1.5; rchangeconstr =
Table[-\[Alpha] <= (r[i + 1] - r[i])/\[Theta] <= \[Alpha], {i, 0,
n}] /. {r[0] -> rmin, r[n + 1] -> rmax};一般假定目标函数(阀门开启面积)与设计变量 ri 有一个简单的线性关系,由 π rv 2(r1+…+rn)/n 给出,其中 rv 是一个与阀门几何形状相关的常数.
In[7]:=
rv = 1;
objfun = Pi rv^2 (1/n) Sum[r[i], {i, 1, n}];选择变量的初始点.
In[8]:=
initpts = Table[.5 (rmin + rmax), {i, 1, n}];求解最大值问题.
In[9]:=
sol = FindMaximum[
Join[{objfun}, varbounds, convexconstr, rchangeconstr],
Thread[vars, initpts]];注意有几个最大半径为最大值  .
.
In[10]:=
Table[r[i], {i, 95, 100}] /. sol[[2]]Out[10]=
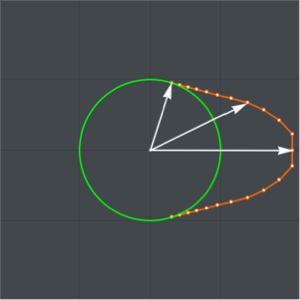
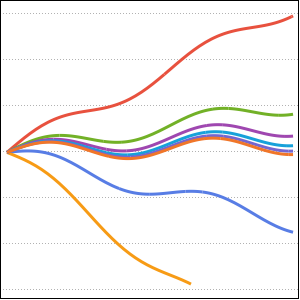
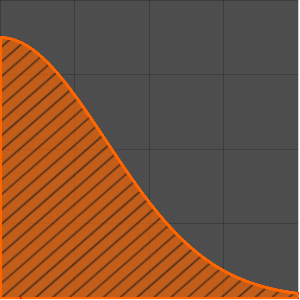
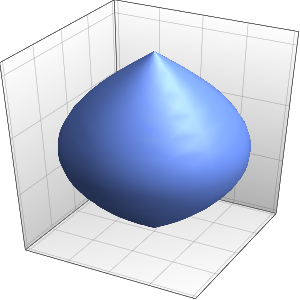
画出解的图形.
显示完整的 Wolfram 语言输入

Out[11]=