Construya un estimador no lineal
Construya un estimador no lineal usando un modelo depredador-presa para estimar la población de liebres de patas blancas basadas en la población de linces. »
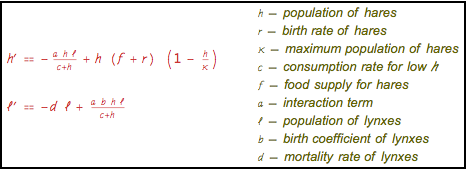 |
La entrada al modelo es y la salida es ℓ.
| In[1]:= | X |
| In[2]:= | 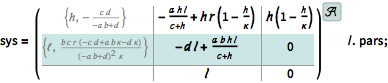 X |
Los valores de la población inicial y un suministro de alimentos que varía periódicamente.
| In[3]:= | X |
Las poblaciones también varían periódicamente.
| In[4]:= | X |
| Out[4]= | 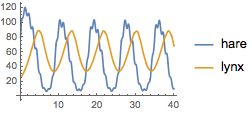 |
Este comportamiento de ciclo límite también se puede ver en un gráfico paramétrico.
| In[5]:= | X |
| Out[5]= | 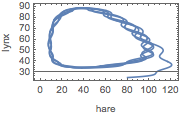 |
Calcule un conjunto de ganancias de estimador basado en el modelo linealizado.
| In[6]:= | X |
| Out[6]= |
Construya el estimador no lineal usando las ganancias computadas.
| In[7]:= | X |
| Out[7]= | 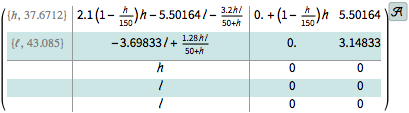 |
Las entradas de observador son y ℓ.
| In[8]:= | X |
| Out[8]= |  |
Después de los transitorios iniciales, el valor estimado converge en el actual.
| In[9]:= | X |
| Out[9]= |  |




















