Beobachterentwürfe anhand von Rückführungslinearisierung
Rückführungslinearisierung ermöglicht außerdem den Entwurf nichtlinearer Beobachter unter der Verwendung linearer Verfahren. Schätzen Sie den Gierwinkel  und die Giergeschwindigkeit
und die Giergeschwindigkeit  für ein Schiff mit Rumpflänge
für ein Schiff mit Rumpflänge  und Geschwindigkeit
und Geschwindigkeit  , basierend auf dem Norrbin-Modell und unter der Verwendung der Rückführungslinearisierung. »
, basierend auf dem Norrbin-Modell und unter der Verwendung der Rückführungslinearisierung. »
| In[1]:= | X |
| In[2]:= |  X |
| Out[2]= |  |
Die Rückführung ist in diesem Modell vollständig linearisierbar.
| In[3]:= | X |
| Out[3]= |
Berechnen Sie die Beobachterverstärkung via Polplatzierung.
| In[4]:= | X |
| Out[4]= |
Arbeiten Sie den nichtlinearen Beobachter aus.
| In[5]:= | X |
| Out[5]= |  |
Stellen Sie die geschätzten Zustandstrajektorien für eine bestimmte Geschwindigkeit dar.
| In[6]:= | X |
| In[7]:= | X |
| In[8]:= | X |
| Out[8]= | 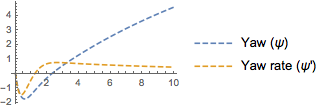 |
Berechen Sie die tatsächlichen Zustandstrajektorien.
| In[9]:= | X |
| Out[9]= |  |
Vergleichen Sie die tatsächlichen und geschätzen Werte für Gierwinkel und Giergeschwindigkeit.
| In[10]:= |  X |
| Out[10]= |  |




















