Evalúe un diseño de controlador lineal usando simulación no lineal
Partiendo de un modelo no lineal, diseñe un controlador lineal y evalúe el rendimiento del controlador en un sistema no lineal.
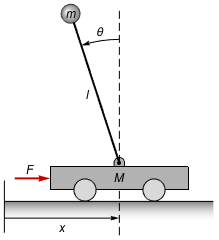 |
El modelo de un péndulo invertido es no lineal, pero lineal en la fuerza de entrada  .
.
| In[1]:= | X |
| In[2]:= | X |
| In[3]:= | X |
| Out[3]= | 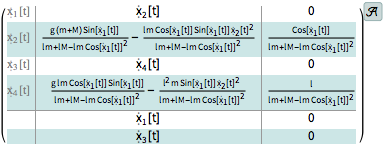 |
Diseñe un controlador basado en el modelo lineal.
| In[4]:= | X |
| Out[4]= |
Conecte el controlador lineal en el modelo no lineal.
| In[5]:= | X |
| Out[5]= | 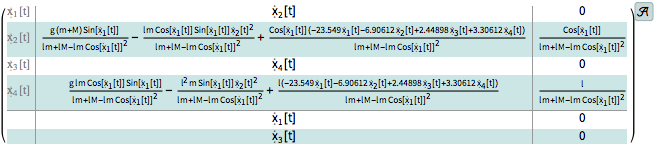 |
Simule el sistema de circuito cerrado no lineal.
| In[6]:= | X |
| In[7]:= | X |
| Out[7]= | 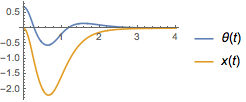 |




















