Avalie o projeto de um controlador linear usando simulação não linear
Começando com um modelo não linear, projete um controlador linear e avalie o desempenho do controlador no sistema não linear.
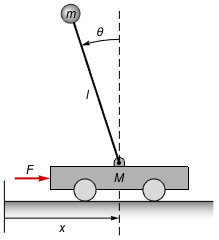 |
O modelo de um pêndulo invertido é não linear, mas linear na força de entrada  .
.
| In[1]:= | X |
| In[2]:= | X |
| In[3]:= | X |
| Out[3]= | 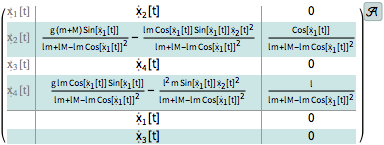 |
Projete um controlador baseado no modelo linear.
| In[4]:= | X |
| Out[4]= |
Conecte o controlador linear ao modelo não linear.
| In[5]:= | X |
| Out[5]= | 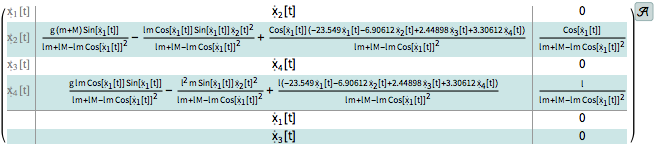 |
Simule o sistema de malha fechada não linear.
| In[6]:= | X |
| In[7]:= | X |
| Out[7]= | 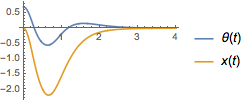 |




















