Examples of Affine Systems
The control inputs appear linearly in a wide variety of applications, and thus many systems can be modeled effectively using AffineStateSpaceModel.
The model of a flexible joint. »
 |
| In[1]:= |  X |
A model for an induction motor in d-q (direct-quadrature) rotating coordinates with inputs  as inputs. »
as inputs. »
 |
| In[2]:= | 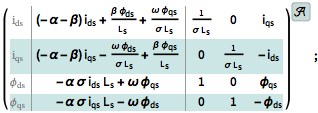 X |
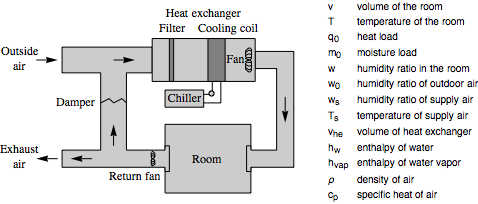
A model for a room cooling system with the air and water flow as inputs. »
 |
| In[3]:= |  X |
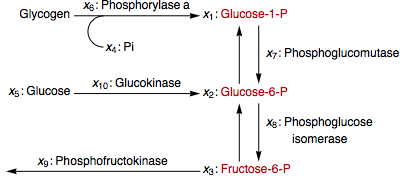
The model of a glycolytic-glycogenolytic pathway where the rates of metabolites  ,
,  , and
, and  are taken as the inputs, and
are taken as the inputs, and  ,
,  ,
,  , and
, and  are kept constant. »
are kept constant. »
 |
| In[4]:= | 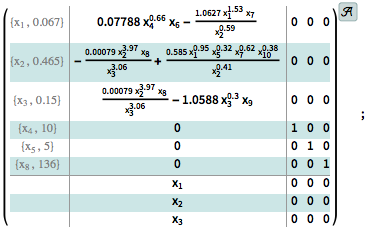 X |




















