Linearização por realimentação
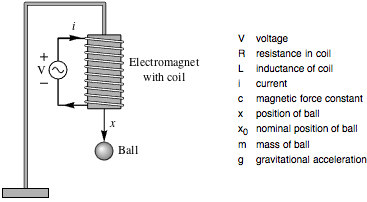
Linearização por realimentação é um processo de linearização exata que computa transformações de realimentação e estado para linearizar um sistema não linear e permite o projeto de controladores não lineares utilizando técnicas lineares. Compare projetos de controlador baseados em linearização exata e aproximada para um sistema de levitação magnética.
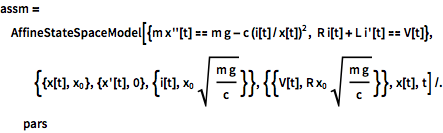
O modelo afim pode ser obtido diretamente das equações governantes.
| Out[2]= | 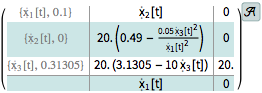 |
Trata-se completamente de linearização por realimentação, já que não há dinâmicas residuais.
| Out[4]= |  |
Compute a estabilização dos ganhos de realimentação usando o sistema exatamente linearizado.
| Out[5]= |  |
Simule o sistema de malha fechada para condições iniciais dadas.
| Out[7]= |  |
Compute a estabilização dos ganhos de realimentação usando o sistema aproximadamente linearizado.
| Out[8]= |  |
O projeto baseado na linearização exata tem uma resposta melhor.
| Out[10]= | 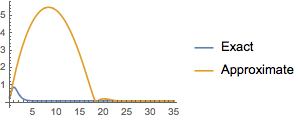 |
O controlador não linear usado no projeto de linearização exata.
| Out[11]= |  |
O esforço de controle gasto.
| Out[13]= | 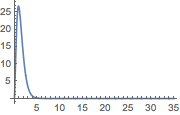 |
O esforço gasto para o processo exato é muito menor do que o do aproximado.
| Out[15]= | 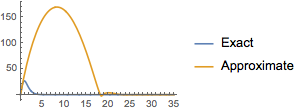 |
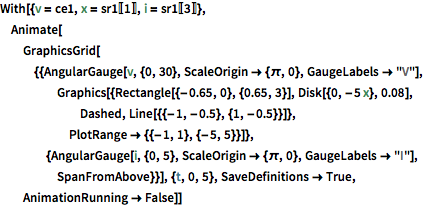
Uma animação da bola sendo levitada usando o controlador não linear.
mostre o input completo de Wolfram Languageoculte o input