反馈线性化
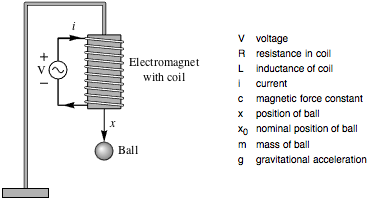
反馈线性化是一个精确的线性化处理,计算状态和反馈变换以便线性化非线性系统,并允许使用线性技术设计非线性控制器. 根据对磁悬浮系统进行精确和近似的线性化,比较控制器的设计.
 |
可以从控制方程直接获取仿射模型.
| In[1]:= | X |
| In[2]:= | 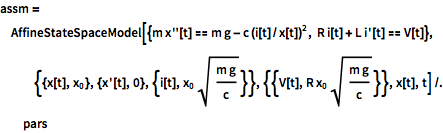 X |
| Out[2]= | 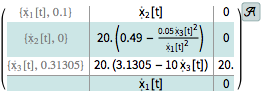 |
由于没有残留运动,可完全进行反馈线性化.
| In[3]:= | X |
| In[4]:= | X |
| Out[4]= |
使用精确线性化系统计算稳定的反馈增益.
| In[5]:= | X |
| Out[5]= |
对给定初始条件模拟闭环系统.
| In[6]:= | X |
| In[7]:= | X |
| Out[7]= | 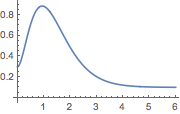 |
使用近似线性化系统计算稳定的反馈增益.
| In[8]:= | X |
| Out[8]= |
基于精确线性化的设计有更好的响应.
| In[9]:= | X |
| In[10]:= | X |
| Out[10]= |  |
使用精确线性化设计的非线性控制器.
| In[11]:= | X |
| Out[11]= |
消耗的控制力.
| In[12]:= | X |
| In[13]:= | X |
| Out[13]= | 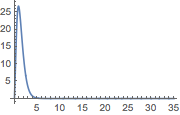 |
对精确范例消耗的力比近似范例更加少.
| In[14]:= |  X |
| In[15]:= | X |
| Out[15]= | 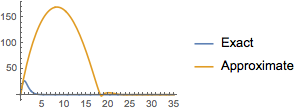 |
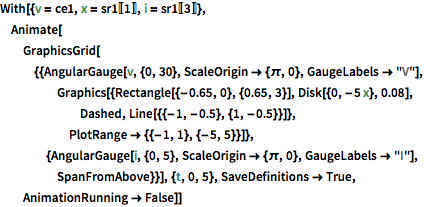
使用非线性控制器浮起的球的动画.
|





















