フィードバック線形化
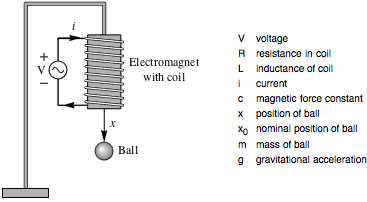
フィードバック線形化は状態とフィードバック変形を計算して非線形系を線形化し,線形手法を使って非線形制御器の設計を可能にする厳密な線形化プロセスである.磁気浮上システムに対する厳密および近似の線形化をもとにした制御器の設計を比較する.
 |
アフィンモデルは支配型方程式から直接得ることができる.
| In[1]:= | X |
| In[2]:= | 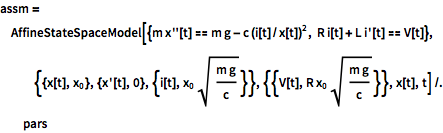 X |
| Out[2]= | 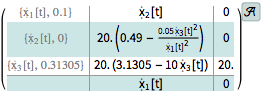 |
残差力がないので、 これは完全にフィードバック線形が可能である.
| In[3]:= | X |
| In[4]:= | X |
| Out[4]= |
厳密に線形化された系を使って,安定フィードバックゲインを計算する.
| In[5]:= | X |
| Out[5]= |
指定された初期条件に対する閉ループ系をシミュレーションする.
| In[6]:= | X |
| In[7]:= | X |
| Out[7]= | 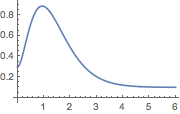 |
近似的に線形化されたシステムを使って,安定フィードバックゲインを計算する.
| In[8]:= | X |
| Out[8]= |
厳密な線形化に基づく設計の方が応答がよい.
| In[9]:= | X |
| In[10]:= | X |
| Out[10]= | 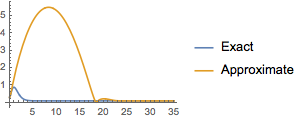 |
厳密な線形化設計で使用された非線形制御器.
| In[11]:= | X |
| Out[11]= |
消費された制御努力.
| In[12]:= | X |
| In[13]:= | X |
| Out[13]= | 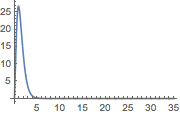 |
厳密な場合に消費された力は,近似の場合に消費された力よりもずっと少ない.
| In[14]:= |  X |
| In[15]:= | X |
| Out[15]= | 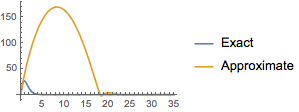 |
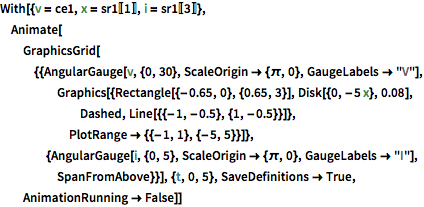
非線形制御器を使って浮上したボールのアニメーション.
|





















