推定器のある漸近出力追従
健康的なECG信号を維持するための心ペースメーカーのための制御器を設計する.信号がすべて測定されるわけではないので,制御器は推定器を含まなくてはならない. »
三次の心拍モデル.
| In[1]:= | 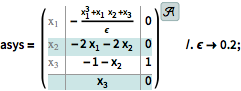 X |
刺激が完全にゼロの場合,ECG信号はゼロである.
| In[2]:= |  X |
| Out[2]= | 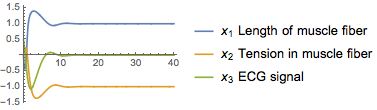 |
モデルは状態  と
と  を含むいくつかのゼロダイナミクスを表す.
を含むいくつかのゼロダイナミクスを表す.
| In[3]:= | X |
| In[4]:= | X |
| Out[4]= | 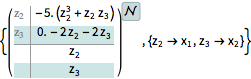 |
ゼロダイナミクスはうまく動作する.
| In[5]:= |  X |
| Out[5]= |  |
 の参照データはphysionet.orgから得られる.
の参照データはphysionet.orgから得られる.
| In[6]:= |  X |
追従制御器を計算する.
| In[7]:= | X |
| Out[7]= |  |
推定器ゲインの集合を計算する.
| In[8]:= | X |
| Out[8]= |
完全な制御器.
| In[9]:= | X |
| Out[9]= | 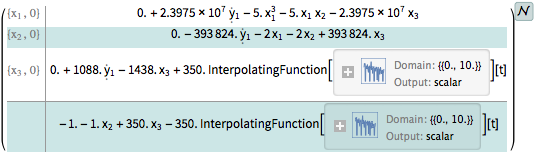 |
シミュレーションで,追従が達成されたことが分かる.
| In[10]:= | X |
| In[11]:= | X |
| Out[11]= | 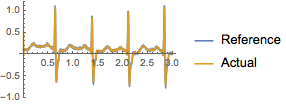 |




















