Nichtlineare Regelsysteme
Version 10 extends its control systems capabilities to fully embrace nonlinear systems. Affine and general nonlinear systems can be exactly represented. Not only does this allow for simulation of closed-loop systems at full fidelity, but it enables a new generation of advanced design and analysis techniques. Nonlinear control design using only linear techniques and no approximation can be accomplished using exact linearization. In addition, fully nonlinear designs enable asymptotic output tracking or disturbance rejection of modeled disturbances.
- Neue Systemmodelle für affine und allgemein nichtlineare Systeme.
- Die automatische Unterstützung für die exakte Linearisierung affiner Systeme macht nichtlineare Regelungsentwürfe mit jedem beliebigen linearen Regelungsverfahren lösbar. »
- Automatische Unterstützung für die Carleman-Linearisierung allgemeiner nichtlinearer Systeme bis hin zu affinen Systemen. »
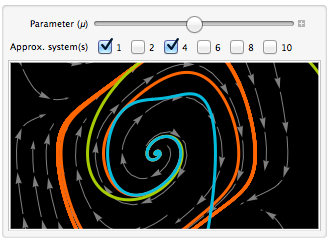
- Automatische Unterstützung für die Linearisierung affiner und allgemeiner nichtlinearer Systeme bis hin zu linearen Standardsystemen durch die Taylor-Reihe.
- Einfache Verbindung linearer, affiner und nichtlinearer Systeme zur Simulation geschlossener Regelsysteme in höchster Genauigkeit.
- Komplette Bandbreite an Standardanalysemethoden (Regelbarkeit, Beobachtbarkeit, Vektoren verschiedener Ordnungen etc.) für affine Systeme.
- Allgemeine Zustandsraumtransformationen für affine und allgemeine nichtlineare Systeme.
- Kanonische Standard-Dreieckszerlegungen für affine Systeme.
- Automatischer Entwurf des Hauptausgangsreglers zur Kompensation modellierter Störungen.
- Einrichtung zur Regelung asymptotischer Ausgangsgrößen zugunsten gewünschter Ausgangstrajektorien.
- Erweiterte Manipulationsoptionen für Systeme, inklusive Extrahierung von Subsystemen und Systemzusammenführung etc.
- Unterstützung für die Auswertung der Stabilität nichtlinearer Systeme anhand von Kreis- und Popov-Kriterien.
Related Examples
 Affine Nonlinear Systems »
Affine Nonlinear Systems »
 Examples of Affine Systems »
Examples of Affine Systems »
 General Nonlinear Systems »
General Nonlinear Systems »
 Example of a General Nonlinear System »
Example of a General Nonlinear System »
 Feedback Linearization »
Feedback Linearization »
 Estimator Design Using Feedback Linearization »
Estimator Design Using Feedback Linearization »
 Carleman Linearization »
Carleman Linearization »
 Evaluate a Linear Controller Design Using Nonlinear Simulation »
Evaluate a Linear Controller Design Using Nonlinear Simulation »








Verwandte FunktionenAffineStateSpaceModel  NonlinearStateSpaceModel FeedbackLinearize StateTransformationLinearize CarlemanLinearize LinearizingTransformationData StateSpaceTransform FullInformationOutputRegulator AsymptoticOutputTracker SystemsModelVectorRelativeOrders ControllableModelQ ObservableModelQ ControllableDecomposition ObservableDecomposition SystemsModelLinearity StateSpaceModel SystemsModelMerge StateFeedbackGains OutputResponse FeedbackSector
NonlinearStateSpaceModel FeedbackLinearize StateTransformationLinearize CarlemanLinearize LinearizingTransformationData StateSpaceTransform FullInformationOutputRegulator AsymptoticOutputTracker SystemsModelVectorRelativeOrders ControllableModelQ ObservableModelQ ControllableDecomposition ObservableDecomposition SystemsModelLinearity StateSpaceModel SystemsModelMerge StateFeedbackGains OutputResponse FeedbackSector
NonlinearStateSpaceModel FeedbackLinearize StateTransformationLinearize CarlemanLinearize LinearizingTransformationData StateSpaceTransform FullInformationOutputRegulator AsymptoticOutputTracker SystemsModelVectorRelativeOrders ControllableModelQ ObservableModelQ ControllableDecomposition ObservableDecomposition SystemsModelLinearity StateSpaceModel SystemsModelMerge StateFeedbackGains OutputResponse FeedbackSector



